
新闻动态
news dynamic
news dynamic
发布日期:2022-07-14
7月13日,天津大学医疗机器人与智能系统研究院2022年第三期研究生阅读报告分享会在研究院301会议室举行。研究院副院长李进华、左亮,共性技术平台负责人邢元,导师潘立志以及研究院2021级、2022级全体博士生和硕士生现场或视频参加会议。

本次共有3名硕士生进行阅读报告分享。会议首先由2021级硕士生程天天进行题为《腹腔微创手术机器人远程控制与实验研究》的报告分享:
文章紧密围绕机器人辅助远程手术需求,以自主研制的“MicroHand S”手术机器人系统为对象,对Internet通讯方式下远程微创手术机器人系统设计与实现开展研究。文章作者从外科手术发展趋势及开展机器人远程手术的研究意义出发,开展了原理研究、确立远程系统主、从操作手构型、远程控制系统方案设计、实验验证、全文总结与展望。在自主研制的手术机器人基础上,确定了远程通讯方式为Internet,采用直接控制策略,运用客户机/服务器通讯模式并开发了数据采集卡等一系列的硬件设备,开发了友好型用户显示界面。并运用设计的远程控制系统和手术机器人完成了北京和天津之间的套环实验,验证了文章设计方案的可行性。文章最后对下一步的工作展望与计划进行了说明:立足远程手术中的时延、可靠性、安全性三个问题,更进一步地去解决问题或降低这些问题给远程手术带来的影响。
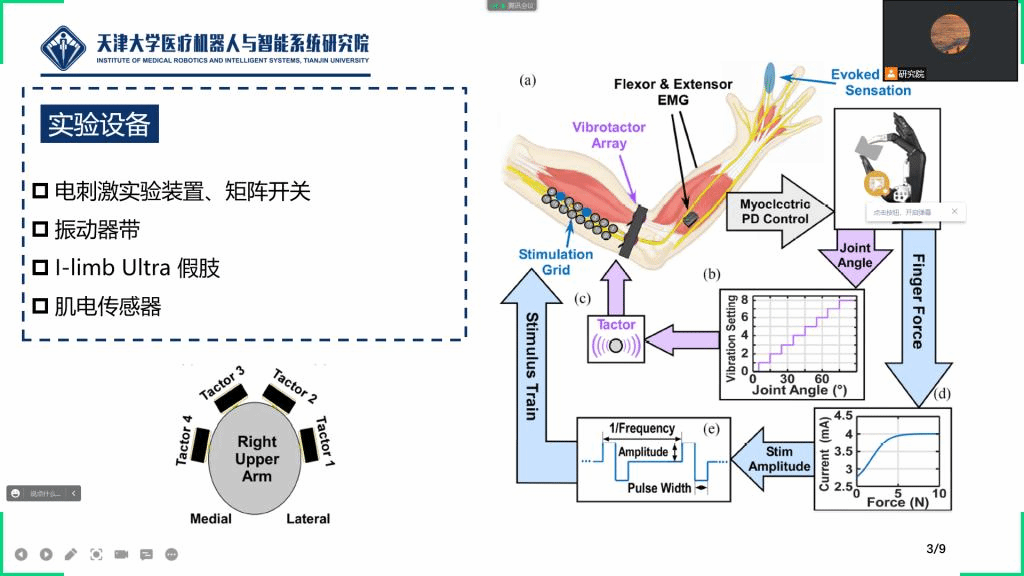
随后,2021级硕士生任志豪进行了题为《Object Recognition via Evoked Sensory Feedback during Control of a Prosthetic Hand》的报告分享:
这篇论文评估了当参与者控制假手时,外部诱发的触觉和本体感觉反馈以及肌电控制策略如何影响对物体属性的识别。指尖触觉是通过使用经皮神经刺激栅格来编码假体的指尖力来产生的。一组手爪引出图案化的振动刺激,以编码假肢手指关节的触觉本体感觉运动学信息。利用手指屈伸肌的肌电信号控制假体关节角度的位置或速度。参与者被要求通过同时进行触觉和触觉本体感觉反馈来控制假手执行物体属性(硬度和大小)识别。通过诱发的反馈,完好者和截肢者在位置和速度控制的成功率从50%到100%的情况下识别出物体的硬度和大小,在不同的控制方案中没有显著差异。研究发现表明,以非侵入性方式诱发的体感反馈可以促进对假手的闭环控制,并允许同时识别不同的对象属性。这些结果有助于我们理解感觉反馈在双向人机交互中的作用,这可能会促进用户在使用假手进行对象交互时的体验。
2021级硕士生丁忠义进行题为《EMG-based Simultaneous Estimations of Joint Angle and Torque during Hand Interactions with Environments》的报告分享:
肌电信号现在常被用来解码人类的运动意图,但是大多数解码方式局限在解码单一运动学参数或者单一动力学参数。该文章提出了一种新的基于肌电信号的实时解码技术,该技术的核心处理器是能够学习具有可变时滞的长时间跨度时间序列的Long-Short-Term-Memory (LSTM)网络。文章中对单向LSTM网络和双向LSTM网络进行了测试。实验招募了8名受试者,在机器人产生阻力的情况下,对沿给定轨迹运动的手腕关节进行了验证。在与环境的相互作用中,在实际变量和估计变量之间,该解码方法在动力学(即扭矩)估计方面提供了大于93%的一致性,在运动学(即角度)估计方面提供了大于83%的一致性。该解码策略的提出解决了人类与环境交互时需同时考虑位置和力的需求。
与会老师分别对三位同学的汇报进行点评,并提出了宝贵的意见,要求大家继续夯实专业基础,紧跟国内外最新研究进展。同学们也对本次分享文献中的问题与老师进行了深入的交流。经过投票,丁忠义同学成为本期阅读分享会的“优秀报告”获奖者。此次会议,为同学们建立了研讨交流的平台,锻炼了同学们的文献阅读整理能力和PPT制作、汇报交流能力,为今后培养学术思维打好坚实的基础。

