
新闻动态
news dynamic
news dynamic
发布日期:2022-10-19
10月19日,天津大学医疗机器人与智能系统研究院2022-2023学年度第一学期第六期研究生阅读报告分享会在腾讯会议以线上形式举行。研究院副院长李进华、左亮,研究院2021级、2022级全体博士生和硕士生现场或视频参加会议。
本次共有3名研究生进行阅读报告分享,会议首先由2021级硕士研究生汪里旗进行文献分享,文献题目为《An improved scheme for eliminating the coupled motion of surgical instruments used in laparoscopic surgical robots》。
该同学首先对研究背景进行了简单介绍:在柔性丝传动机构传动过程中,由于传动机构存在机械间隙、丝轮(或丝鞘)传动系统中具有摩擦以及丝的受摩擦力变形导致柔性变形,在电机从零开始转动或运动方向改变时器械末端不能立即响应,即存在一定迟滞现象。
文中作者针对迟滞误差补偿提供了一个新的思路:利用电机转矩与电流信号的关系(为下图1所示),从电流信号中提取出迟滞时间的大小从而计算迟滞角度。为了保证计算的准确性和鲁棒性,用机器学习算法(SVM支持向量机)对计算过程进行学习,对电机所处的阶段(迟滞阶段与正常运动阶段)进行分类。并基于传动阶段与迟滞角度提出了前馈补偿算法。最后,并匀速运动、匀加速运动等运动对模型与算法进行实验,得到了使位置误差减小89.42%的效果。
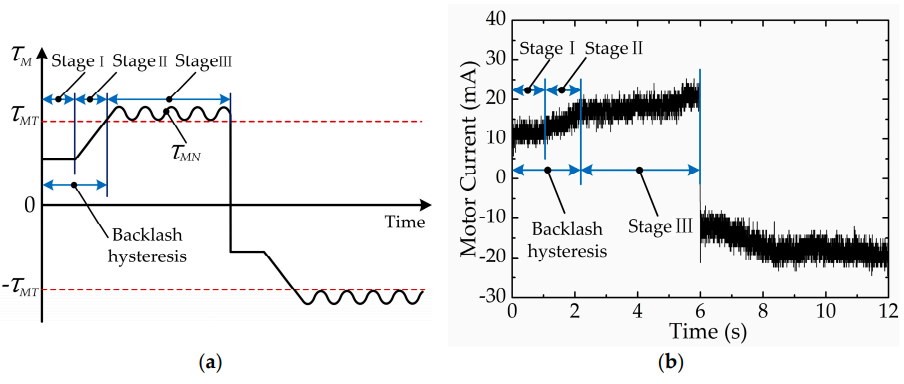
图1 不同状态下电机转矩与电流示意图(文献中为图6)
随后,2022级硕士研究生谭景文进行了题为《Development of an Imaged-guided Surgical Robot for Bone Tumor Resection》的文献报告分享,本篇文章是一篇研究骨肿瘤切除的国际会议论文,该团队来自中国科学院大学沈阳自动化研究所,主要从事医疗机器人的技术改进和分析的研究。文章分为Abstract,Introduction,Materials & Methods,Experinments,Conclusion & Discussion 和 acknowledgement,六个部分,报告着重于对于研究方法,思路,分析和结果的前五部分进行分享。
谭同学首先介绍了Abstract和Introduction中传统骨科手术精度低、风险高、手术效果不理想等不足,骨科手术机器人的应用迫在眉睫,同时机器人在全髋关节等骨科手术中应用较广,而在骨肿瘤切割技术领域有待探索,因此本文的研究思路和方法将有很大的参考和借鉴意义。
在Materials & Methods环节的介绍中,谭同学侧重于对匹配算法、点云、法兰坐标系等概念的解释与拓展,以及它们在该机器人匹配算法中应用,同时也对其中的坐标变换进行了解释和推导,如下图2所示。
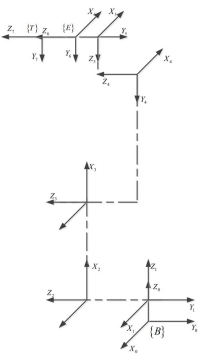
图 2 机器人平台示意图(文献中为图2)
在Experinments的介绍中,他向其他同学介绍了该实验的最终结果,即测量三维模型和实验用骨之间的差距,选择路径曲线上的5个关键点,比较它们在图像空间中的计划路径曲线和实际切除路径曲线之间的差异,规划路径和实际切除路径曲线的平均误差为1.32mm,说明该实验思路和算法可充分提高实验的准确性。
Conclusion & Discussion中则阐述了实验中存在的问题,如末端执行元件刚度不足,以及实验材料局限等问题,并提出未来的实验将简化外科医生操作界面,优化无菌实验环境等方式,进一步减小切除肿瘤的误差。
该篇文章分享的最后,谭同学还讲述了自己读这篇英文论文的全过程,该论文对于点云、匹配算法理解的帮助,对于骨科机器人领域的认知也进一步提升,同时也指出了自己关于文献筛选、机器人坐标变换等知识和经验的不足,将通过多读相关的英文论文、学习《机器人学》等方式弥补自己的弱点,提升相应的能力。
最后,2022级硕士研究生王锶焓进行题为《Optimal Design of a Novel Spherical Scissor Linkage Remote Center of Motion Mechanism for Medical Robotics》的报告分享:
本篇文章为解决乳腺超声图像质量高度依赖技术人员操作以及带来的骨骼肌肉损伤问题,设计了一种球面剪叉型RCM机构作为超声探头的支架(如下图3所示),文献的分享从设计、优化与实验三个方面展开叙述。
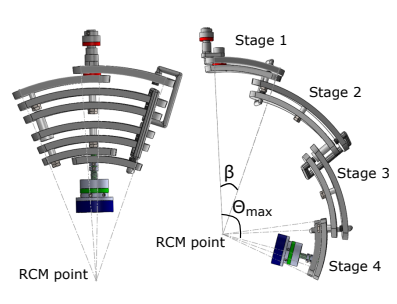
图 3 RCM机构示意图(文献中为图1)
设计过程中使用虚关节法(VJM)对机构进行建模,用DH法进行了正运动学分析;在刚度分析过程中将非线性问题转化为线性问题求出了整体的刚度矩阵,其中对弧形梁的刚度进行了推导;使用条件数以及利用条件数构造的GCI指数对结构内奇异性进行了量化分析。
优化过程中分析了基本剪叉单元弧度β及单元数量对刚度和GCI指数的影响;在帕累托边界选择刚度最大的点,使用遗传算法选定了β值。样机实验中测定了实际运动位置与正运动学计算位置的误差。
本文总体较为完整的展示了球面剪叉机构的设计优化过程,但运动精度有待提高,后续需要对结构进行优化。
与会老师分别对三位同学的汇报进行点评,并提出了宝贵的意见,参会的同学们就本次分享文献中的问题与老师交流了心得体会,加深了对知识的理解。

