
新闻动态
news dynamic
news dynamic
发布日期:2022-09-15
近期,天津大学医疗机器人与智能系统研究院开展2022-2023学年第一学期第一期研究生阅读报告分享会。本次分享会共有1名博士生和1名硕士生进行阅读报告分享。
会议首先由2021级博士生高原进行题为《Robotic Endoscope Control Via Autonomous Instrument Tracking》的报告:
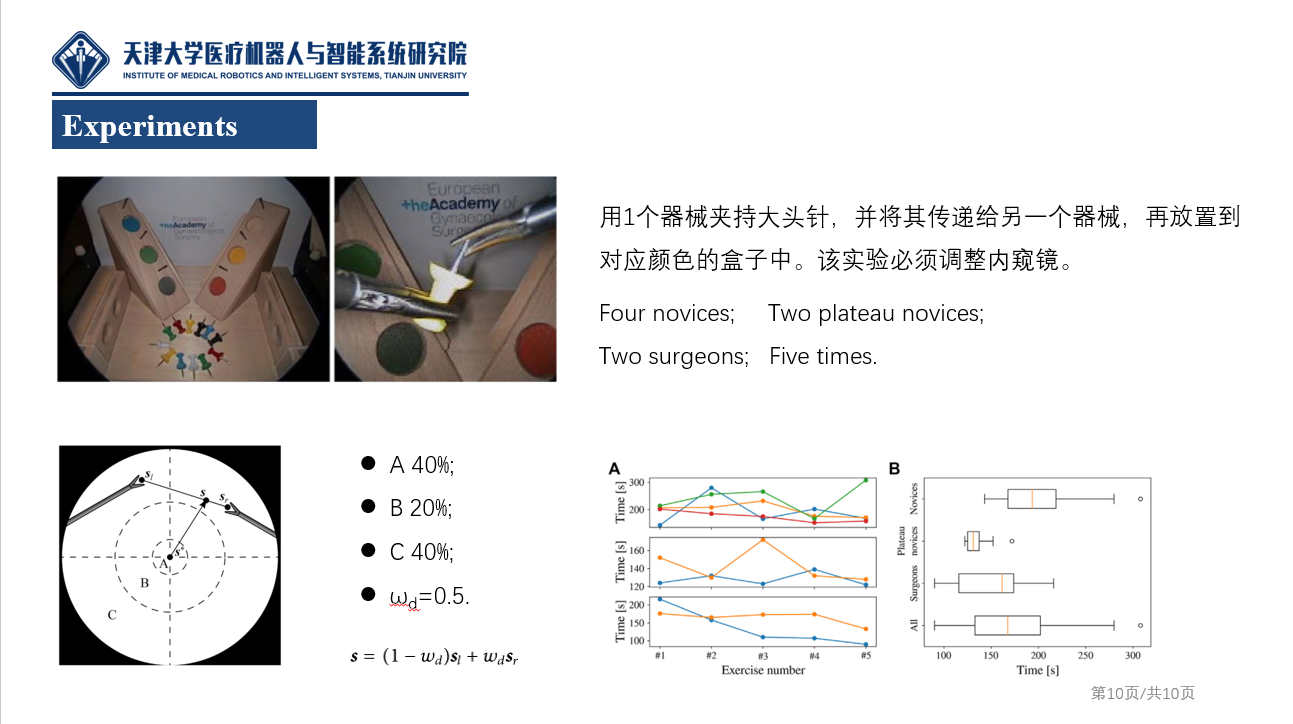
传统微创手术中需要专门的医护人员控制内窥镜以提供手术视野,长时间的持镜会引起持镜医护的疲劳,导致图像稳定性降低,延长手术时间,甚至会引起手术视野丢失带来误操作。本文设计了一种内窥镜机器人以代替医护人员夹持和控制内窥镜,同时提出了一种机器人自主执行内窥镜定位的方法。文章基于手术器械分割的工具进行器械定位,并通过位置和三维图像混合的方法控制,以确保内窥镜摄像机平稳和适当的运动。最后通过由欧洲妇科外科学会提出的腹腔镜练习方法进行验证试验。试验结果表明,文章所用方法可以在尽量不干涉医生注意力的前提下,顺利完成验证试验中的频繁内窥镜移动。
随后,2022级硕士生张驰进行了题为《微创手术机器人从手夹持力反馈研究》的报告:
微创手术机器人系统缺少有效的夹持力反馈机制,医生无法感知到手术器械与人体组织间的作用力大小,仍然需要通过反复训练才能够适应实际的手术操作,手术器械由于自身体积较小也不方便安装额外的力传感器,且术前的消毒环节也会对传感器造成破坏,随着深度学习神经网络的发展,只通过驱动电机的某些参数拟合器械的夹持力成为可能,该文章从这一角度入手提出了一种新的解决方案。
该文章对主从手设备进行结构与运动学分析,完成主从遥操作理论分析;同时提出一种基于长短期记忆网络的学习算法、编写程序并验证。该文章提出了一种新的基于神经网络的预测模型,可以对器械手指的夹持力进行很好的估计,使医生能够感知到术中的作用力大小,提高微创手术的可操作性。
此次是研究院2022级新生首次参与报告的阅读分享会,与会老师分别对两位同学的汇报进行了点评,同时,对2022级如何找准自己研究方向,融入研究院大家庭提出了宝贵的意见。

