
新闻动态
news dynamic
news dynamic
发布日期:2026-04-07
近日,天津大学医疗机器人与智能系统研究院在中科院二区Top期刊《IEEE Internet of Things Journal》(IF=8.9)上发表题为“Sequence-to-Sequence Predictive Control for Telesurgery Under Network Fluctuations in the Internet of Medical Things”的研究论文。研究院2023级硕士研究生曾帅为第一作者,天津大学邢元副教授和赵建厂副研究员为通讯作者,相关研究得到国家自然科学基金、国家重点研发计划等项目资助。
远程手术(telesurgery)凭借物联网医疗(IoMT)技术的支撑,正为偏远地区患者带来高质量医疗服务的希望。然而,网络延迟、抖动、数据包丢失等波动问题,始终是制约远程手术安全性的关键瓶颈。针对此问题,研究院远程医疗装备中心团队创新提出基于序列到序列(S2S)预测的遥操作动态预测控制(TDPC)策略,为破解远程手术网络波动这一行业痛点提供了解决方案。值得一提的是,该团队早在2023年6月联合青岛大学附属医院、越南顺化市中央医院、中国移动等多家单位,成功完成了中国青岛与越南顺化之间的国际首例跨国机器人远程输尿管软镜手术动物试验,为此次理论成果的落地奠定了坚实基础。

国际首例跨国机器人远程输尿管软镜手术动物试验
远程手术的核心是通过网络实现主刀医生操作与远端手术机器人的实时同步。但在物联网环境中,物理距离、电磁干扰等因素会导致三类典型网络问题:
(1)延迟:信号传输耗时,导致机器人动作滞后于医生操作;
(2)抖动:延迟时间随机波动,破坏操作连贯性;
(3)数据包丢失:控制信号中断,可能引发机器人误动作。
现有解决方案多依赖网络建模,或仅针对延迟等单一问题,难以全面应对复杂波动。TDPC策略的核心是不被动等待网络传输信号,通过预测未来若干步器械位姿,让从端在网络不稳定时仍能连续、平滑执行操作。该框架融合深度时间序列预测模型、自适应时延补偿、丢包监测、卡尔曼滤波校正等模块,无需显式网络建模,大幅提升了不利通信条件下的系统鲁棒性。
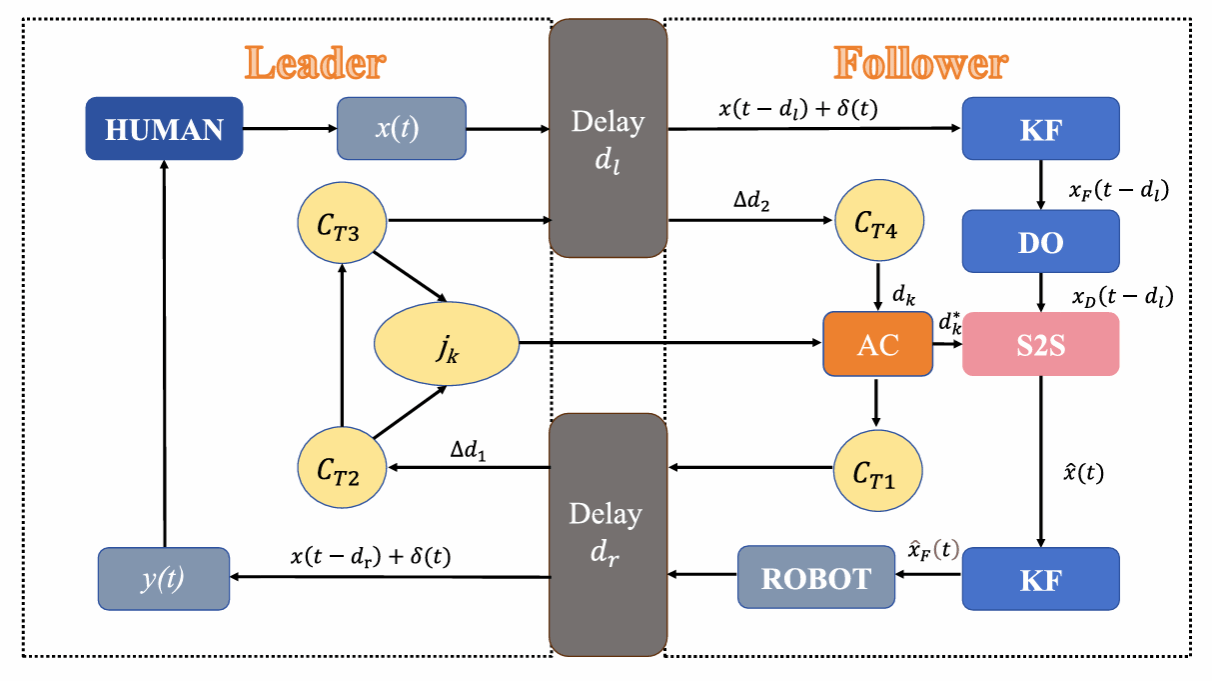
TDPC控制流程图
TDPC的实现依赖轻量级序列到序列(S2S)预测模块,具体流程为:从端接收带时间戳的操作者位姿序列,并使用丢包观测器插补缺失数据包;通过卡尔曼滤波进行去噪与平滑处理;借助基于TimeMixer的预测器输出未来位姿序列和自适应延迟补偿器确定输出的未来位姿,并以固定频率滚动更新;预测输出前再次滤波,抑制预测噪声,平衡实时性与精度。其中,TimeMixer神经网络通过多尺度时间序列分解、季节混合、趋势混合等模块,实现对未来位姿的精准预测,为控制策略提供核心技术支撑。
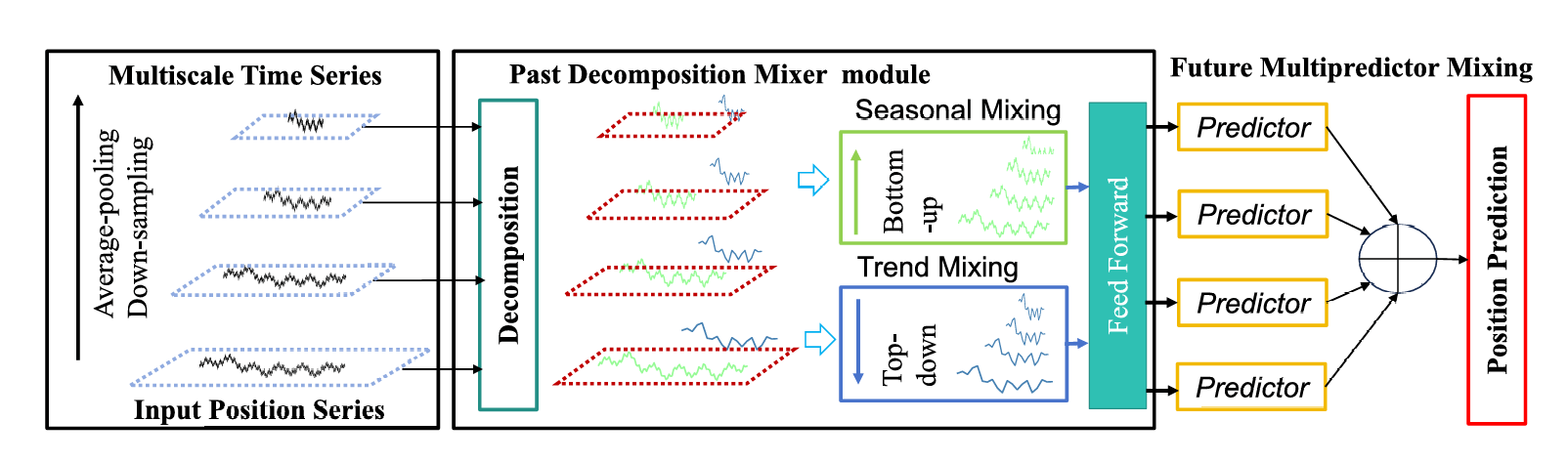
TimeMixer神经网络架构图
为了验证效果,研究团队搭建了高保真的对比平台:在ROS2系统中进行基准测试,同时在Qt实时控制界面中进行面向实际执行的实验评估,并覆盖动态时延/抖动、随机丢包以及不同预测模型对比等场景。在丢包实验中,论文给出了0%、5%、10%、20%丢包率条件,并指出TimeMixer 在不利条件下仍能保持较稳定的预测质量与轨迹一致性,体现出框架在IoMT通信波动下的适应性与鲁棒性。
团队还进行了更贴近“临床操作链路”的支气管镜体模(bronchoscopy phantom)远程实验验证。主从端电脑通过Wi-Fi无线连接到中间服务器,让受试者通过视觉反馈操控从端支气管镜从A点移动至更深层支气管分支目标点。在模拟不利IoMT条件时,引入单向时延332.87 ms、抖动54.26 ms、丢包9.87%的干扰,并对比“无预测控制”与“使用TDPC”两种条件。结果显示,TDPC使平均任务用时降低28.35%、错误降低66.67%,同时RMSE/MSE等指标也有超过10% 的改善。论文据此认为该策略有助于提升受网络波动影响时的操控效率与准确性,并强调其在IoMT远程手术中的潜在价值。
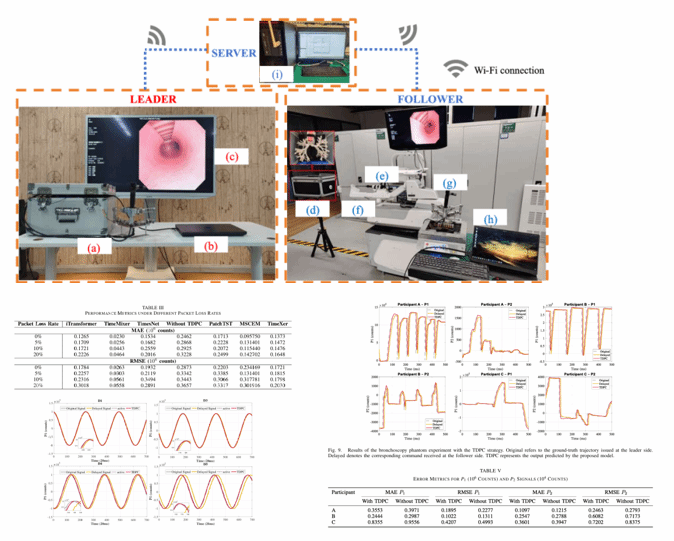
实验设置与结果图
TDPC策略具备可扩展、模块化的特点,不仅适用于IoMT 远程手术,还可推广至所有控制信号类型已知且可获取的遥控制系统,尤其适配对时延敏感的网络化控制与遥操作领域。作者在研究中也明确了技术边界:未在实际远程手术临床实验中测试该控制系统,且因手术场景的强实时性与安全约束,未采用纯端到端方案。未来将通过引入手术流程相关上下文特征、改进预测器与插值器、增加监督和反馈调节机制等方向,进一步增强系统稳定性。
论文信息:S.Zeng, Y.Xing, H.Niu, et al. Sequence-to-Sequence Predictive Control for Telesurgery Under Network Fluctuations in the Internet of Medical Things[J]. IEEE Internet of Things Journal, 2025, 12(24): 52990-53003. DOI: 10.1109/JIOT.2025.3615617.

