
新闻动态
news dynamic
news dynamic
发布日期:2026-04-16
4月13日,天津大学医疗机器人与智能系统研究院开展2026年第六期研究生阅读报告分享会,5名研究生依次进行了阅读报告分享。
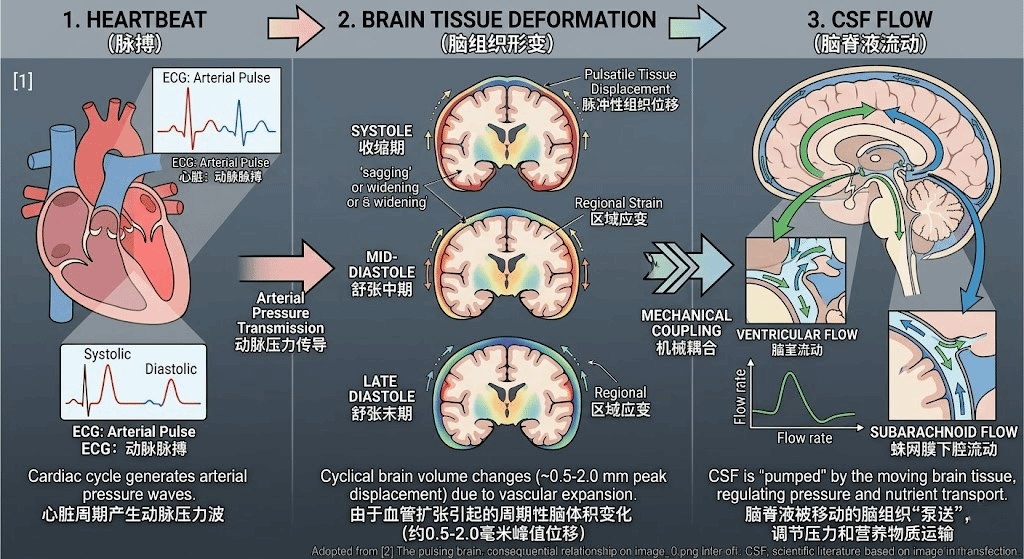
研究院2025级博士研究生白祎扬分享了论文《The pulsing brain: state of the art and an interdisciplinary perspective》。文章指出大脑并非静止结构,而是受心动驱动的流固耦合系统,影像中观测到的不只是简单位移,更需要进一步解释其背后的力学状态。
本文系统梳理了脑脉动在MRI方面的观测方法,PC-MRI、DENSE能够直接获得速度、位移或应变等定量信息,更适用于力学建模;bSSFP、aMRI更偏向动态显示与后处理估计。文献还介绍了PC-MRI、dynDWI、fMRI、bSSFP等神经流体动态MRI方法,以及TPI超声在活体条件下进行脑组织实时观测的潜力,指出其具有实时、无创、床旁可用等优势,但受颅骨成像限制。DENSE结果表明,脑脉动并非整体平移,而是伴随拉伸与压缩并存的局部三维形变场。成像的核心价值在于为针—组织交互力学建模提供约束,植入针推进速度可能显著影响压陷、穿刺力及细针屈曲风险。总体而言,该文献构建了“成像观测—力学解释—应用分析”的统一框架,为课题后续研究提供了新的思路。
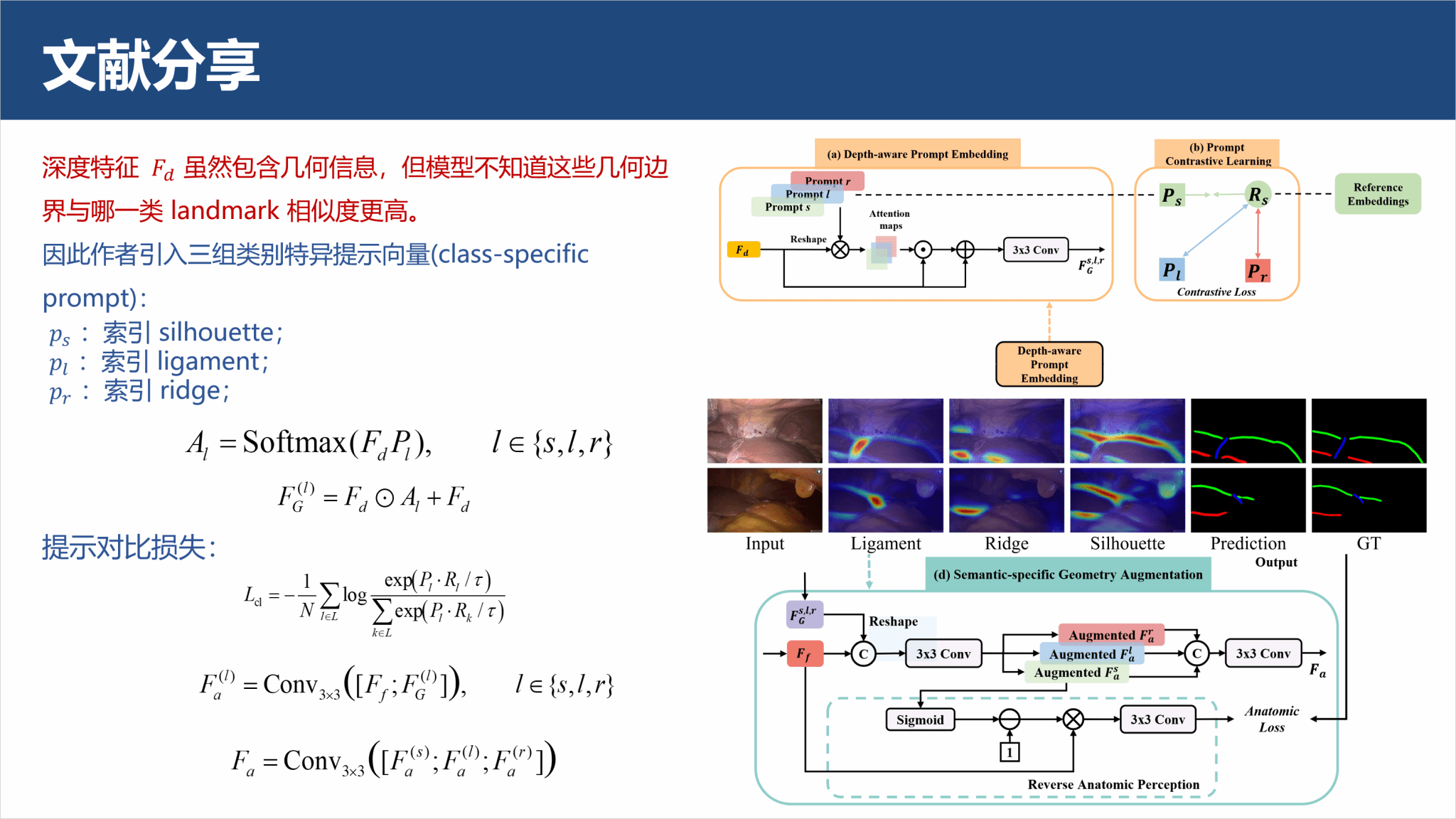
研究院2025级博士研究生王一围绕《腹腔镜肝脏手术中的解剖标志检测》进行报告分享。肝脏表面的关键解剖结构可以作为术前3D肝脏模型与术中2D视频配准的桥梁,从而为增强现实导航提供基础,帮助医生更准确地理解肿瘤和内部结构的位置关系。针对现有分割/检测方法对肝脏整体几何形态、尤其是深度信息利用不足的问题,论文构建了L3D数据集,提出了D2GPLand方法。
方法首先利用深度估计网络生成深度图,再结合ResNet提取RGB结构特征,并用冻结的SAM编码器提取深度中的全局几何特征。核心设计包括:一是DPE(Depth-aware Prompt Embedding),通过类别提示学习,让模型从深度特征中提取与不同解剖标志对应的几何信息;二是BFU,融合RGB与深度特征;三是SGA(Semantic-specific Geometric Augmentation),将类别相关几何信息进一步注入检测过程,并通过“反向解剖感知”增强对模糊结构的识别能力。实验结果表明,D2GPLand在L3D测试集上达到63.52% Dice和48.68% IoU,优于对比方法。本文将深度几何、基础模型特征和术中导航需求联系起来,为后续的腹腔镜2D–3D配准与增强现实引导提供了较有潜力的技术基础。
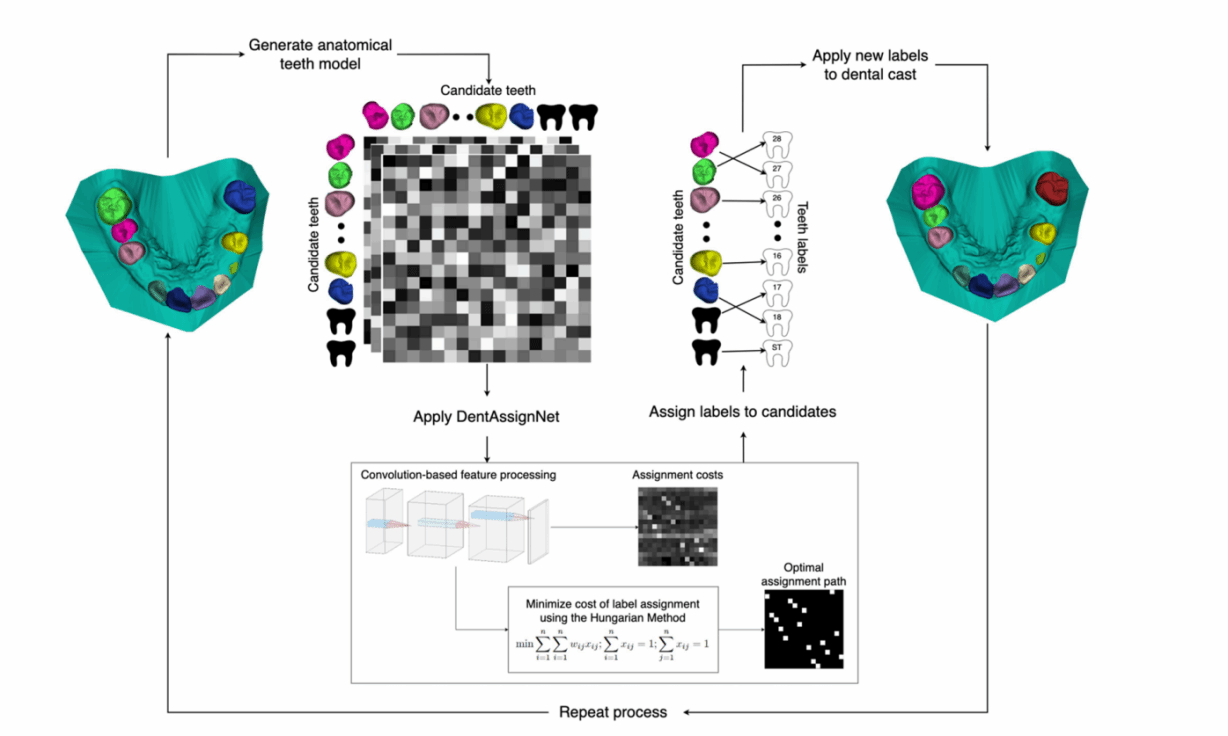
研究院2024级硕士研究生李泽鑫围绕《面向胫骨高位截骨术的钢板与钉道规划系统研究》进行报告分享。针对牙齿缺失、重复或排列异常情况下的标注难题,论文提出了一种用于牙齿三维模型自动标注的深度学习方法DentAssignNet,将牙齿标注建模为“分配问题”,通过寻找候选牙齿与标准标签之间的最优匹配,提高整体一致性与鲁棒性。
方法整体包括三个阶段:首先利用3D U-Net对牙齿进行粗分割,从三维口腔模型中提取牙齿区域;然后结合曲率信息和随机游走算法进行细分割,优化牙齿边界;最后构建DentAssignNet网络进行标注。该网络以牙齿之间的两两几何关系作为输入,通过卷积神经网络生成候选牙齿与标签之间的代价矩阵,并引入匈牙利算法求解最优分配,使每个牙齿与标签一一对应。论文还构建了统计解剖模型来描述牙齿间的空间关系,利用高斯分布评估匹配程度,使模型具备全局结构感知能力。同时引入“虚拟节点”机制,有效处理缺失牙齿问题。实验结果表明,该方法在复杂异常情况下仍具有较高识别精度和良好泛化能力,为结构相关目标的自动标注提供了一种有效思路。
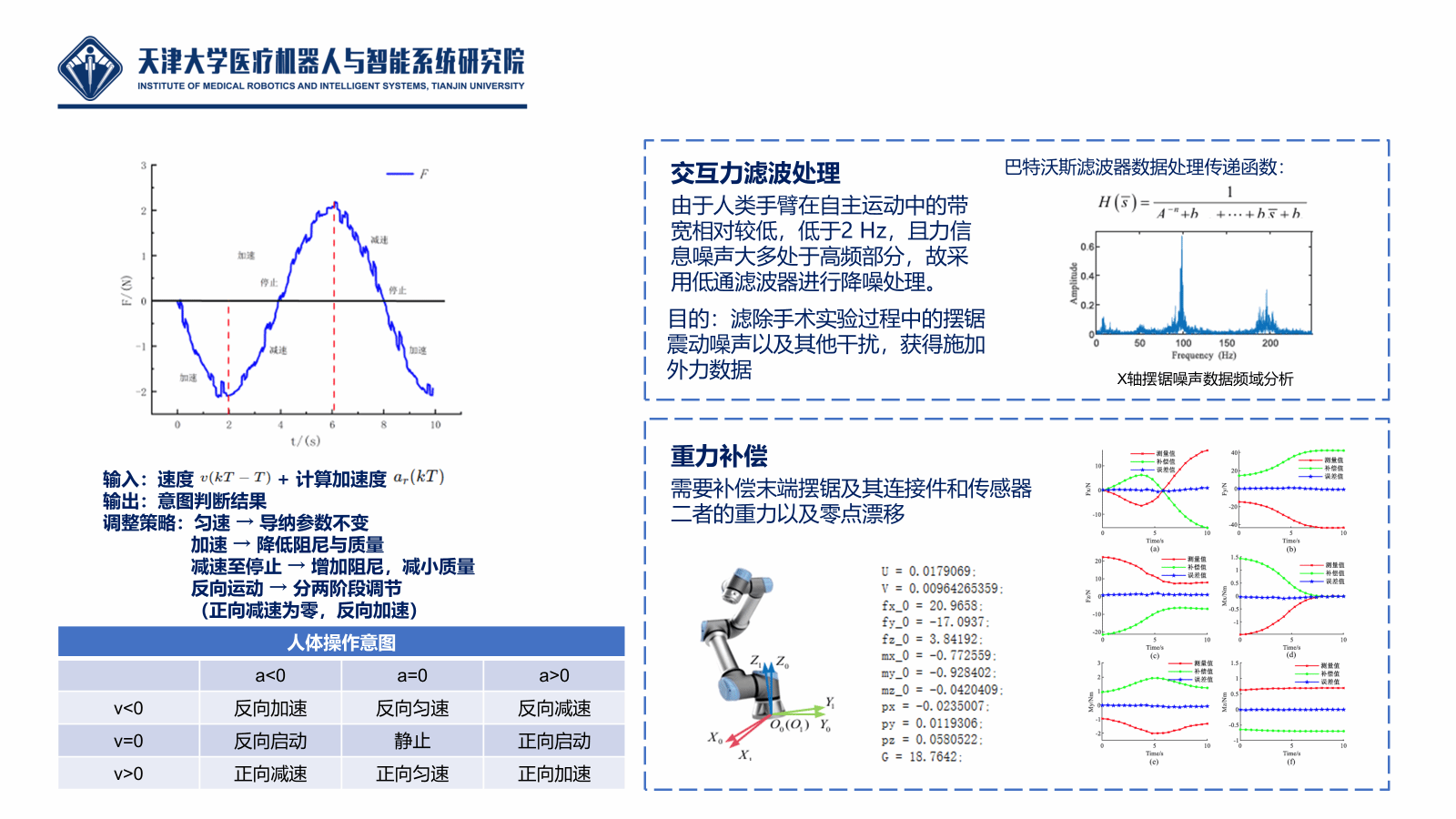
研究院2024级硕士研究生王海榕进行了题为《面向胫骨高位截骨手术机器人的人机协同控制方法研究》的报告分享。研究围绕意图感知、柔顺控制、安全适配、状态识别四大核心方向开展攻关,已完成关键算法设计、模型搭建与实验验证,取得阶段性重要进展。
在操作意图感知方面,完成了六维力信号低通滤波与重力补偿算法实现,可有效滤除摆锯高频振动噪声,消除末端负载与零点漂移干扰,精准提取医生真实操作力。在柔顺控制算法方面,搭建二输入二输出模糊变导纳控制框架,以运动速度、加速度为输入,实时输出自适应虚拟阻尼与质量;引入梯度下降法在线优化模糊映射规则,显著提升不同工况下的柔顺性与鲁棒性。基于短时傅里叶变换与带通滤波,实现摆锯95–100Hz特征频段能量检测,完成开机/关机状态实时识别,自动切换阻尼参数,兼顾自由拖动轻便性与截骨操作稳定性。对比实验表明,优化后的模糊变导纳控制在交互力波动、运动平稳性、能量消耗等指标上均优于定导纳方案,系统响应更平滑、操作更省力。
研究院2024级硕士研究生原裕坤围绕《基于动态约束的机器人跟随定位技术研究》进行报告分享。现有虚拟夹具动态控制方法多面向特定约束,存在依赖模型、抗扰性与实时性不足的问题。文章提出嵌入干扰观测器的通用动态控制方法,可处理二阶可微几何约束,提升系统鲁棒性,但在高速交互与非线性约束场景下精度仍有下降。
针对HTO保膝手术中传统虚拟夹具固定不动、无法适配骨骼微动与摆锯振动的问题,开展动态约束与跟随定位研究,现已完成手术机器人虚拟夹具技术调研,明确禁止型与引导型、硬约束与软约束的特点。在研究进展方面,已建立三级动态虚拟夹具模型,划分安全区、缓冲区与禁入区,实现约束平滑过渡;完成多种滤波算法对比测试,优化信号处理流程;完成动态约束自适应调节与轨迹规划设计,有效提升系统稳定性与定位精度。后续将开展跟踪滞后实验、夹具结构标定、力反馈与力位控制算法优化等研究,逐步完成样机部署,进一步提升手术机器人在动态环境下的安全性与精准度。
文献来源:
[1]Lecchini-Visintini A, Zwanenburg J J M, Wen Q, et al. The pulsing brain: state of the art and an interdisciplinary perspective[J]. INTERFACE FOCUS, 2025, 15(1): 20240058.
[2]Pei J, Cui R, Li Y, et al. Depth-driven geometric prompt learning for laparoscopic liver landmark detection[C]//International Conference on Medical Image Computing and Computer-Assisted Intervention. Cham: Springer Nature Switzerland, 2024: 154-164.
[3]Dascalu T, Ramezanzade S, Bakhshandeh A, et al. DentAssignNet: Assignment Network for Dental Cast Labeling in the Presence of Dental Abnormalities[J]. IEEE journal of biomedical and health informatics, 2025.
[4]Deng, Yingyan, Heng Liu, Xuejin Luo, Siqin Yang and Juncheng Wang. Dynamic Control of Virtual Fixtures Under Arbitrary Differentiable Geometric Constraints with a Disturbance Observer[J].Chinese Journal of Mechanical Engineering (2026): n. pag.

