
新闻动态
news dynamic
news dynamic
发布日期:2026-04-23
4月20日,天津大学医疗机器人与智能系统研究院开展2026年第七期研究生阅读报告分享会,4名研究生依次进行了阅读报告分享。
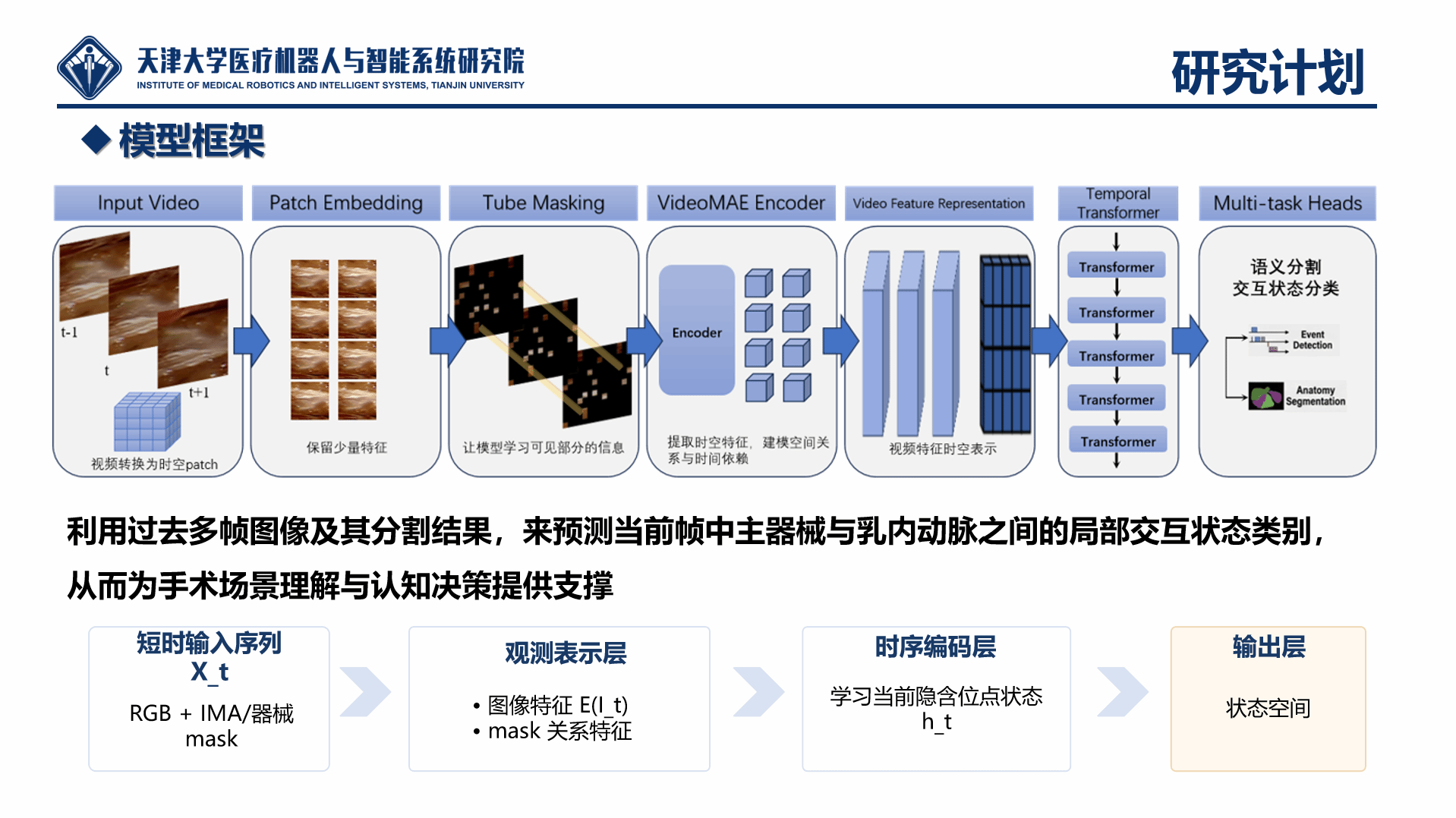
研究院2025级博士研究生魏鑫分享了论文《CAT-SG: A Large Dynamic Scene Graph Dataset for Fine-Grained Understanding of Cataract Surgery》。文章围绕几何空间与语义关系构建,提出了CAT‑SG白内障手术动态场景图数据集与CatSGG场景图生成模型,实现手术视频细粒度理解。
CAT‑SG基于CATARACTS数据集扩展,是当前最大规模手术场景图数据集,包含50例手术视频、29类手术器械与解剖结构、9类交互关系,标注超181万条关系。数据集采用几何+语义双重建模,由分割掩码边界接触直接判定,精准刻画器械‑组织交互,为手术流程建模提供结构化支撑。模型CatSGG采用VideoSwin+Mask2Former架构,先通过视频预训练骨干提取时空特征完成高效实例分割,再用查询嵌入构建实例对并预测语义关系,结合时序池化优化为CatSGG+以提升时序一致性。实验表明,CatSGG的Macro‑F1超现有SOTA模型ORacle 8个百分点,且融入几何空间语义后,手术阶段识别与技术识别精度、F1值均明显提升,验证了几何空间语义建模对手术智能分析的关键价值。
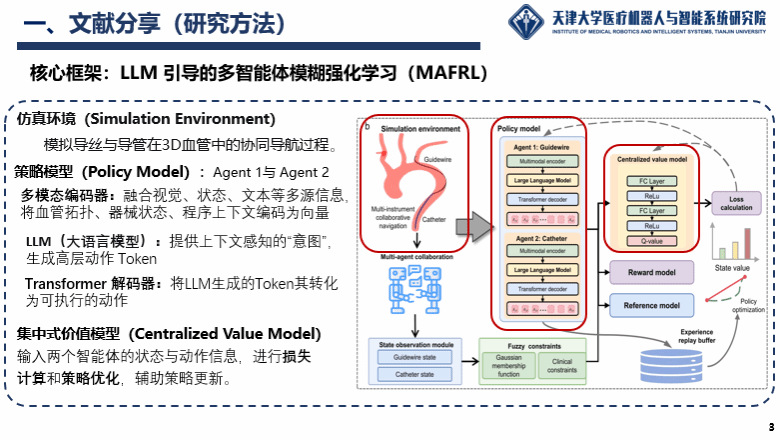
研究院2025级博士研究生马连波进行了题为《机器人辅助血管介入手术术中智能决策系统研究》的报告分享。血管内介入手术中为导航复杂的血管解剖结构,需要对导丝、导管等多种器械进行精准协同控制。基于学习的方法通常局限于单器械控制,无法满足需要多器械协同的复杂临床场景。
研究提出一种大语言模型(LLM)引导的多智能体模糊强化学习(MAFRL)框架,用于实现血管内机器人的任务级自主协同导航。大语言模型提供手术流程先验知识和上下文感知的策略指导,使代表导丝和导管的协作智能体能够做出自适应决策。MAFRL框架的核心是模糊强化学习,通过将临床约束自适应嵌入奖励函数,缓解大语言模型输出带来的不确定性,确保严格遵循手术安全规范并精准匹配真实血管内介入的复杂场景。在三维血管仿真环境中的验证表明,该方法相比传统方法实现了更优的导航性能和手术效率,凸显了大语言模型引导的多智能体强化学习应用于血管内机器人领域的变革性潜力。
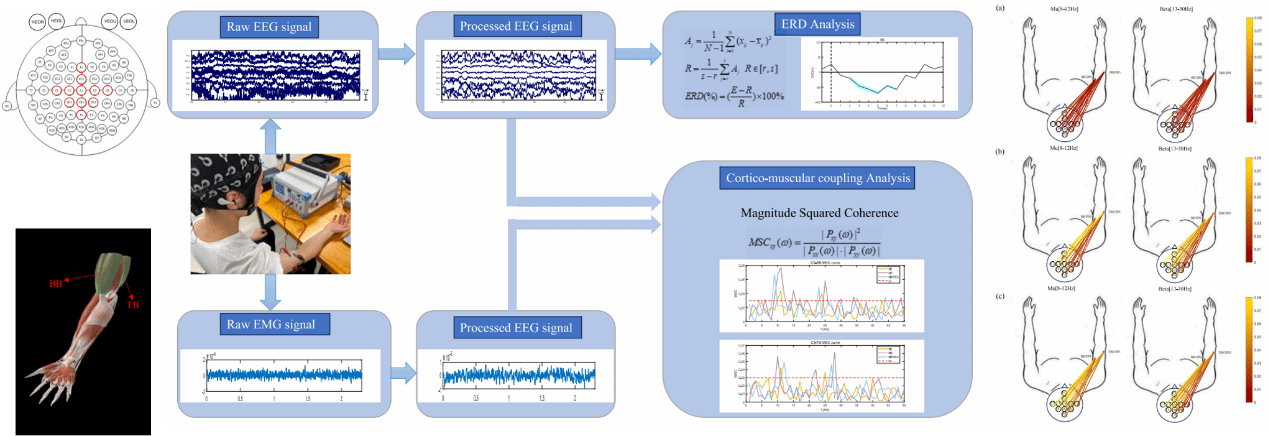
研究院2024级硕士研究生姚锡昭围绕《关于叠加功能性电刺激对运动康复中运动想象的影响研究》进行报告分享。脑卒中等运动障碍患者康复治疗中存在单纯运动想象训练缺乏本体感觉反馈、患侧肌肉无法主动执行精确动作、下行运动传导通路受损导致难以形成正常的“中枢-本体感觉-中枢”神经闭环等挑战。
为解决上述问题,研究人员构建了叠加功能性电刺激(FES)与运动想象结合的康复训练新模式。首先在受试者进行运动想象任务时,同步对目标肌肉施加FES刺激,以诱发被动肌肉收缩并产生本体感觉反馈,再通过采集脑电与肌电信号,计算幅值平方相干性(MSC)和皮层事件相关去同步特征,最后利用显著相干面积(SCA)定量分析皮层-肌肉耦合程度的差异。该研究表明,受试者在FES辅助下的运动想象不仅显著提升了皮层与肌肉的耦合强度,还成功重建了感觉运动的神经闭环通路。
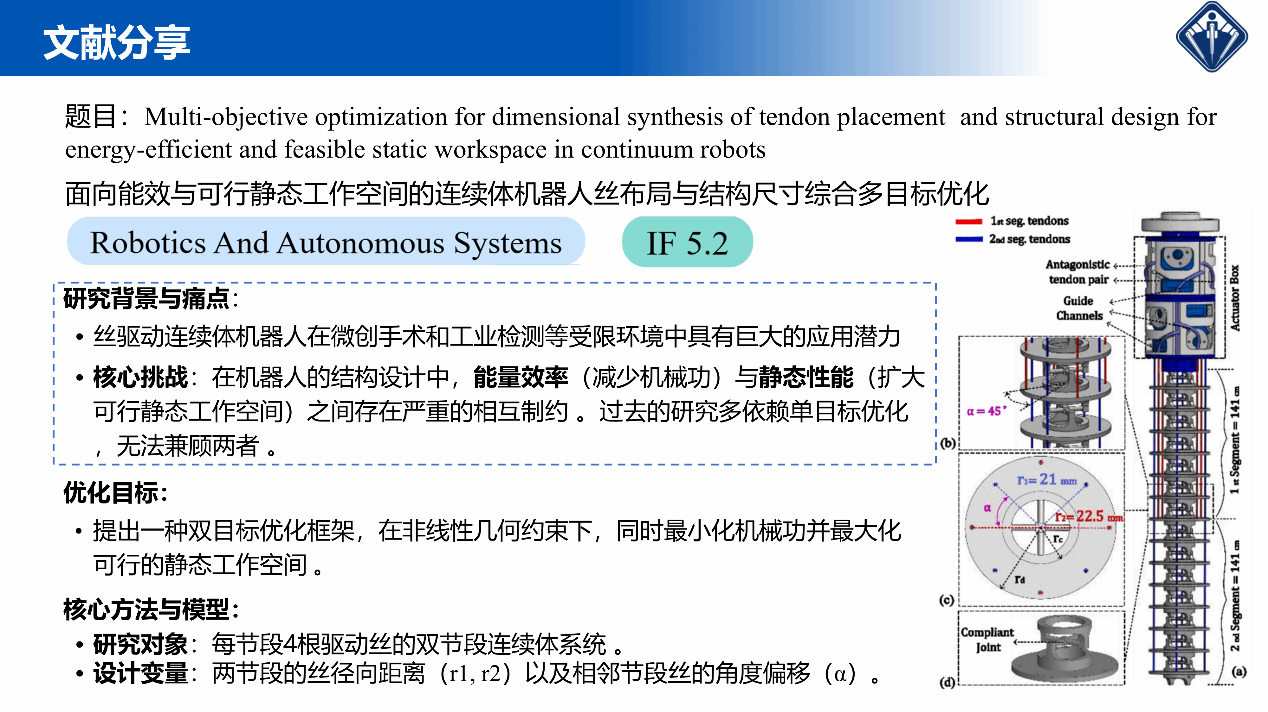
研究院2024级硕士研究生梁峰川进行了题为《面向消化道手术的柔性器械设计与摩擦补偿研究》的报告分享。关于连续体机器人多目标优化的最新研究指出,丝驱动连续体机器人在微创手术等领域极具潜力,但结构设计上面临能量效率与静态性能相互制约的核心痛点。为此,研究团队提出了一种双目标优化框架,以每节段4根丝的双节段系统为对象,选取丝径向距离及相邻节段角度偏移作为核心设计变量。
研究结合分段常曲率理论建立运动静力学模型,并采用基于帕累托的多目标遗传算法(MOGA/NSGA-II)进行求解。统计验证结果表明,采用较大角度偏移(≥30°)及较远径向距离能显著降低机械功并扩大工作空间,并给出了结合实际制造与干涉约束的原型设计建议。该研究打破了几何空间的局限,引入“可行静态工作空间”概念,将参数优化与静力学建模紧密结合,为未来在柔性内镜手术机器人等连续体设备的设计中选取走向严谨的多目标参数优化提供了极大启发。
文献来源:
[1]Holm, F., Ünver, G., Ghazaei, G., Navab, N. (2026). CAT-SG: A Large Dynamic Scene Graph Dataset for Fine-Grained Understanding of Cataract Surgery. In: Gee, J.C., et al. Medical Image Computing and Computer Assisted Intervention – MICCAI 2025. MICCAI 2025.
[2]Yao T, Xu Y, Wang H, et al. Multi-agent fuzzy reinforcement learning with LLM for cooperative navigation of endovascular robotics[J]. IEEE Transactions on Fuzzy Systems, 2025.
[3]Wenyu L. Research on the effects of Superimposed functional electrical stimulation on motor imagery in motor rehabilitation[J]. Biomedical Signal Processing and Control, 2025, 109: 108026.
[4]Jabari M, Visconte C, Quaglia G, et al. Multi-objective optimization for dimensional synthesis of tendon placement and structural design for energy-efficient and feasible static workspace in continuum robots[J]. Robotics and Autonomous Systems, 2025: 105300.

