
新闻动态
news dynamic
news dynamic
发布日期:2022-08-15
8月10日,天津大学医疗机器人与智能系统研究院2022年第六期研究生阅读报告分享会在研究院301会议室举行。研究院副院长左亮,共性技术平台负责人邢元,导师潘立志以及研究院2021级、2022级全体博士生和硕士生现场或视频参加会议。
本次分享共有3名硕士生进行阅读报告分享。会议首先由2021级硕士生程天天进行题为《基于UDP协议的P2P即时通讯软件的设计与实现》的报告分享:
本文以一款基于UDP协议的P2P即时通讯软件的开发过程为主线,详细介绍了相关理论背景知识和实现过程。每一个具体问题的解决都参阅了大量文献资料,进行了诸多探索和研究。着重研究了基于UDP协议的可靠通信、P2P的原理和NAT穿透的方法、信息的加密与解密算法等诸多内容。文章重点介绍了P2P通讯与两层客户机/服务器(Client/Server)网络架构的区别与联系,对其特点进行了充分的说明,并对该通讯方式所遇到的问题NAT穿越进行了重点研究,列举相应的解决方案并针对本文需求选择合适的穿越方法进行软件的设计,最后通过相应的代码编写及实验验证了方案的可行性。
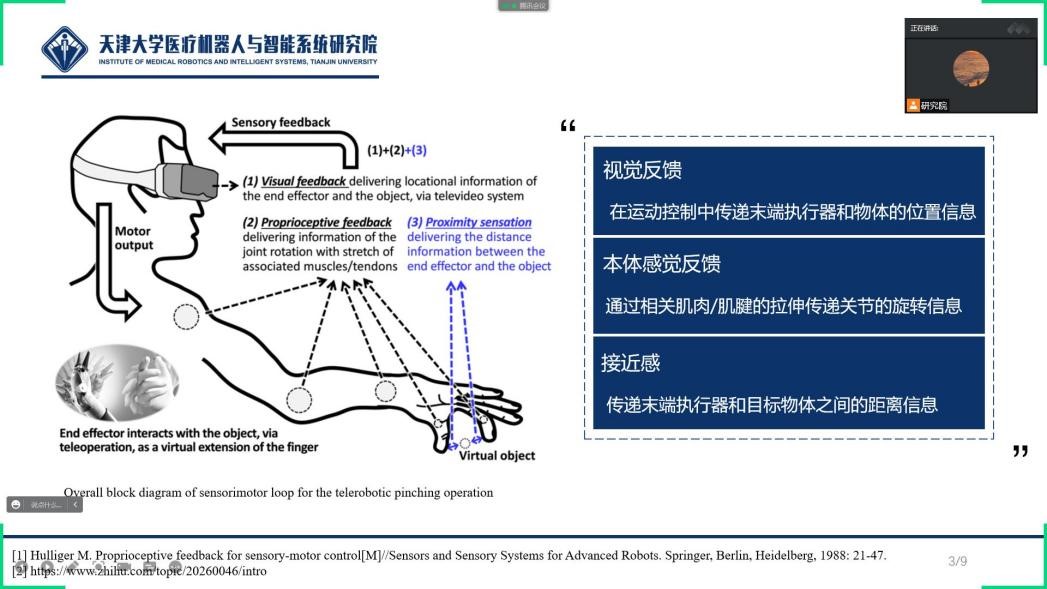
随后,2021级硕士生任志豪进行了题为《Electrically-Evoked Proximity Sensation Can Enhance Fine Finger Control in Telerobotic Pinch》的报告分享:
对于需要高控制精度的遥操作任务,必须向遥操作人员提供有关末端执行器与远程环境之间相互作用的信息。实时成像设备已经被广泛采用,但它提供的信息有限,特别是当末端执行器跟随视线接近目标时。在这种情况下,遥控操作员依靠屏幕上的视角,在初次接触时可能会无意中施加高力。本研究提出将遥操作时的距离信息传递到遥控器的指尖,即近距离感觉。远距离操作者的指尖被施加经皮电刺激,脉冲频率与距离成反比。在仅有视觉、视觉+视觉辅助(屏幕上的距离)和视觉+接近感觉三种感觉条件下,通过远程机器人捏合时的初始接触力来评估接近感觉的效果。对11名健康受试者进行了30-60°和视线两种视角的重复实验。对于这两种情况,初始接触力可以通过视觉辅助(20%-30%)或近距离感觉(60%-70%)显著降低,而不需要额外的处理时间。在力量减少的程度上,近距离感觉比视觉辅助有效两到三倍。
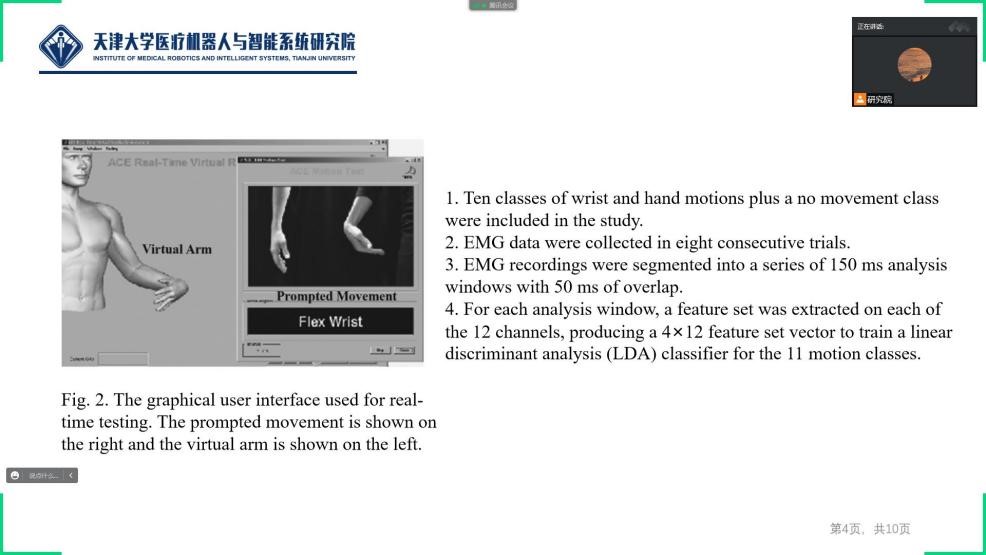
2021级硕士生丁忠义进行题为《Quantifying Pattern Recognition—Based Myoelectric Control of Multifunctional Transradial Prostheses》的报告分享:
论文评估了横断者虚拟手臂的实时肌电模式识别控制。5名单侧患者使用截肢和完整的手臂进行了10次手腕和手部运动。为了证明来自手部固有肌肉的信息的价值,这些数据被包括在完整手臂的肌电记录中。在两只手臂上,平均在0.2s内选择动作,在1.25s内完成动作。大约99%的腕部运动是使用任一只手臂完成的;然而,截肢手臂的手运动完成率明显低于完整手臂。对于截肢手臂,只有6个动作的平均分类精度为93.1%,而所有10个动作的平均分类精度为84.4%。使用6个最佳位置的电极只会将准确度降低到91.5%。这些结果表明,残留前臂的肌肉产生了足够的肌电信息来实时控制手腕,但不能进行多次握手。这项研究的结果可能有助于开发实用的多功能肌电假体,并表明增加肌电信息,例如通过靶向肌肉神经再支配可以改善对这些假体的控制。
与会老师分别对三位同学的汇报进行点评,并提出了宝贵的意见,同学们也对本次分享文献中的问题与老师进行了深入的交流。经过投票,任志豪同学成为本期阅读分享会的“优秀报告”获奖者。此次会议,为同学们建立了研讨交流的平台,对研究领域的前沿技术和知识有了新的认识和学习,同时也有助于2022级硕博生熟悉研究院研究方向,能够尽快地融入研究院,更好地选择自己感兴趣的研究课。

