
新闻动态
news dynamic
news dynamic
发布日期:2022-09-21
天津大学医疗机器人与智能系统研究院2022-2023学年度第一学期第二期研究生阅读报告分享会在腾讯会议以线上形式举行。研究院2021级、2022级全体博士生和硕士生现场或视频参加会议。
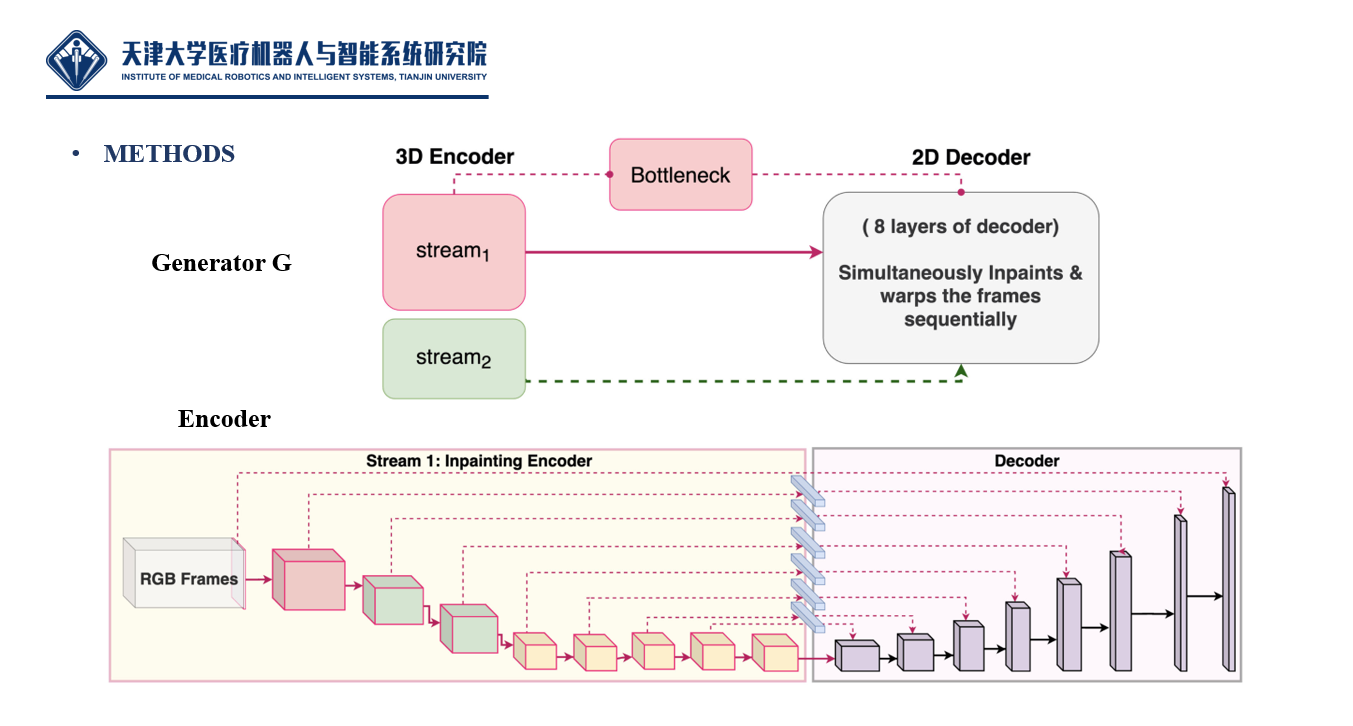
本次共有4名研究生进行阅读报告分享,会议首先由2021级博士生王丰进行了题为《See-Through Vision With Unsupervised Scene Occlusion Reconstruction》的分享:
微创手术最大的挑战之一是通过内窥镜对手术视野进行观察时,由于器械或血雾等会引起的遮挡导致视野模糊,降低手术操作性。本文的目的是提出一种基于全卷积神经网络的无监督端到端深度学习框架,重建遮挡情况下的手术场景视图,并在这些区域为外科医生提供术中透视效果。通过设计了一种生成式稠密连接编码器和解码器结构,通过引入一种新型的三维部分卷积,实现了时空信息的合并,以增强网络的学习能力,融合时间和空间信息。为了训练所提出的框架,提出了结合特征匹配、重建损失、风格损失、时间损失和对抗损失项的损失函数,用于生成高质量的图像重建。本文方法可以用于重建不同大小、位置和方向的不规则形状遮挡的底层视图。性能评价分析验证了该方法的优越性和潜在的临床价值。
2022级硕士生李子凡进行了题为《腹腔镜增强现实导航的研究进展综述》的分享:
腹腔镜手术是应用最多的微创外科手术,但当前腹腔镜手术视野存在局限性,医生在腹腔镜手术中的环境感知能力十分有限,手术效果过度依赖于医生的经验和技巧,因此提出了将增强现实导航技术应用于腹腔镜手术中。该文综述了当前不同临床领域中得到应用或经文献报道的各种腹腔镜增强现实导航(LARN)系统,从导航数据来源、配准方法、显示方式3个不同角度,对当前 LARN 系统进行分类总结和描述。从导航数据来源于术前或术中的角度,将 LARN 系统分为基于术前数据的LARN 和基于术中数据的LARN,重点对其图像配准技术进行介绍,描述了各类典型 LARN系统的研究进展现状及系统特点。最后总结了LARN在临床应用方面的技术难点并对其发展趋势做出了展望。
2022级硕士生梁世龙进行了血管介入机器人相关的分享:
目前的血管介入机器人系统通常缺乏力反馈,无法快速夹紧导管/导丝。从站系统的结构不稳定,动力传输不精确,增加了系统的安全隐患。血管介入机器人一般不遵循传统外科医生的操作习惯,因此,他们不容易理解和学习如何操作。因此,提出了一种新的血管介入系统。从属系统可以快速夹紧导管/导丝,与各种标准导管/导丝尺寸兼容,具有精确的动力传输,并具有稳定的结构。导管/导丝的表面被夹紧而不会损坏。无论是在主端还是从端,都在很大程度上遵循了传统操作者的习惯。结果表明,轴向力的测量精度符合机器人辅助手术的要求,系统能够实时跟踪导管/导丝的设计位置。这项研究为血管内远程手术的主从系统的发展做出了一定的贡献。
2022级硕士生闫嘉宁进行了题为《Optical positioning technology of an assisted puncture robot based on binocular vision》的分享:
这篇文章利用双目视觉来辅助医生进行手术穿刺。其大致流程如下:首先利用CT来扫描人体骨骼模型,利用医学图像处理软件对得到的CT图像进行三维重建得到人体骨骼的三维模型,医生通过重建的三维模型确定穿刺点和目标点,将穿刺点标记在骨骼模型上。接下来利用matlab的工具箱对双目相机进行标定,确定左右相机的内外参数矩阵和两个相机坐标系的相对位置,然后利用双目相机拍摄得到的照片结合图像处理的算法提取标记点的中心坐标,得到左右相机对应标记点的像素坐标,然后利用双目视觉的原理结合得到的左右相机标记点的平面坐标计算出该空间点的三维坐标,将得到的三维坐标发送给机械臂端,控制机械臂移动到穿刺点出辅助医生进行穿刺。本文利用3D打印的骨骼模型进行实验,通过双目视觉测量的空间点的三维坐标在z轴误差比较大为2-3mm的深度,这也是未来改进的方向。

