
新闻动态
news dynamic
news dynamic
发布日期:2026-04-30
4月27日,天津大学医疗机器人与智能系统研究院开展2026年第八期研究生阅读报告分享会,5名研究生依次进行了阅读报告分享。
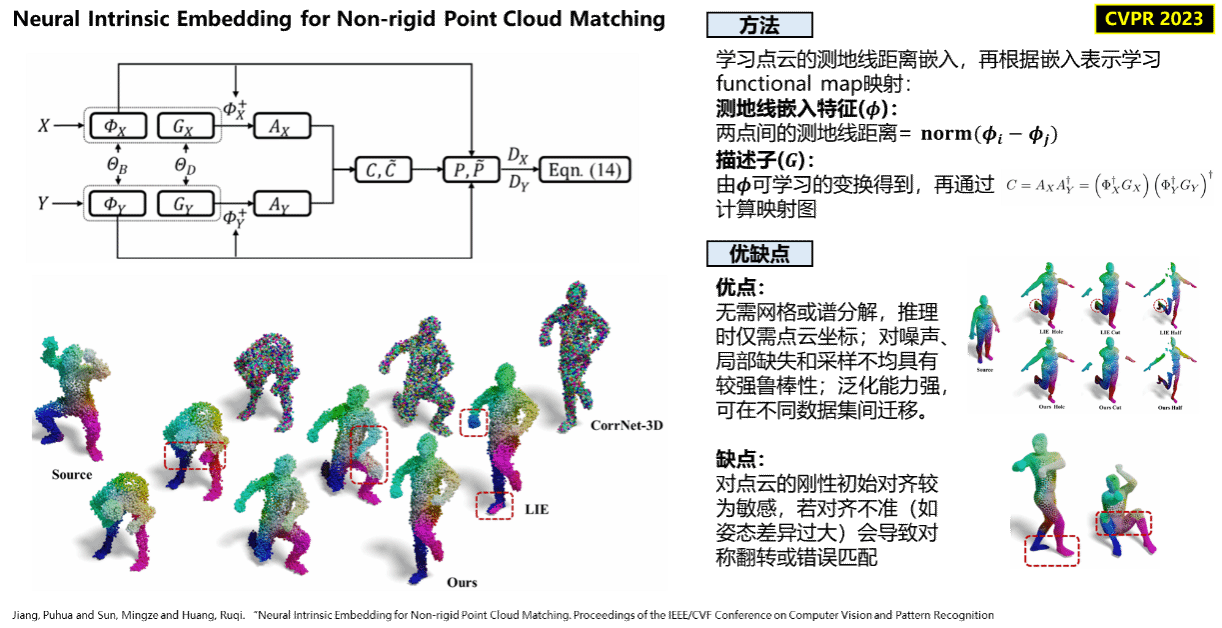
研究院2023级博士研究生史靖进行了题为《形状配准》的报告分享。有文章提出一种用于非刚性点云匹配的新型弱监督学习框架,通过设计神经内在嵌入(NIE),将点云中的每个点映射到一个高维空间,使得该空间中的欧几里得距离能够近似曲面上的测地距离。与传统的谱嵌入方法不同,NIE不需要昂贵的离线特征分解,也不依赖于网格结构,仅需点云本身即可训练。
NIE采用动态图卷积网络(DGCNN)作为骨干,设计了三种损失函数,并对DGCNN的邻域聚合方式进行了改进,以缓解点云采样密度不均带来的偏差。在NIE基础上,作者进一步提出神经内在映射(NIM)网络,用于非刚性点云匹配。NIM借鉴了深度功能映射框架,用NIE替代了固定谱基,并引入自监督的循环一致性和等距损失,无需真实的点对应标签即可训练。在FAUST、SCAPE和SURREAL等数据集上的实验结果表明,NIE在相对测地误差和OPT指标上优于现有嵌入方法(如MDS、LIE等),NIM在匹配精度上接近甚至超过需要更强监督的方法(如WSupFMNet),并展现出良好的泛化能力和对噪声、局部缺失等干扰的鲁棒性。
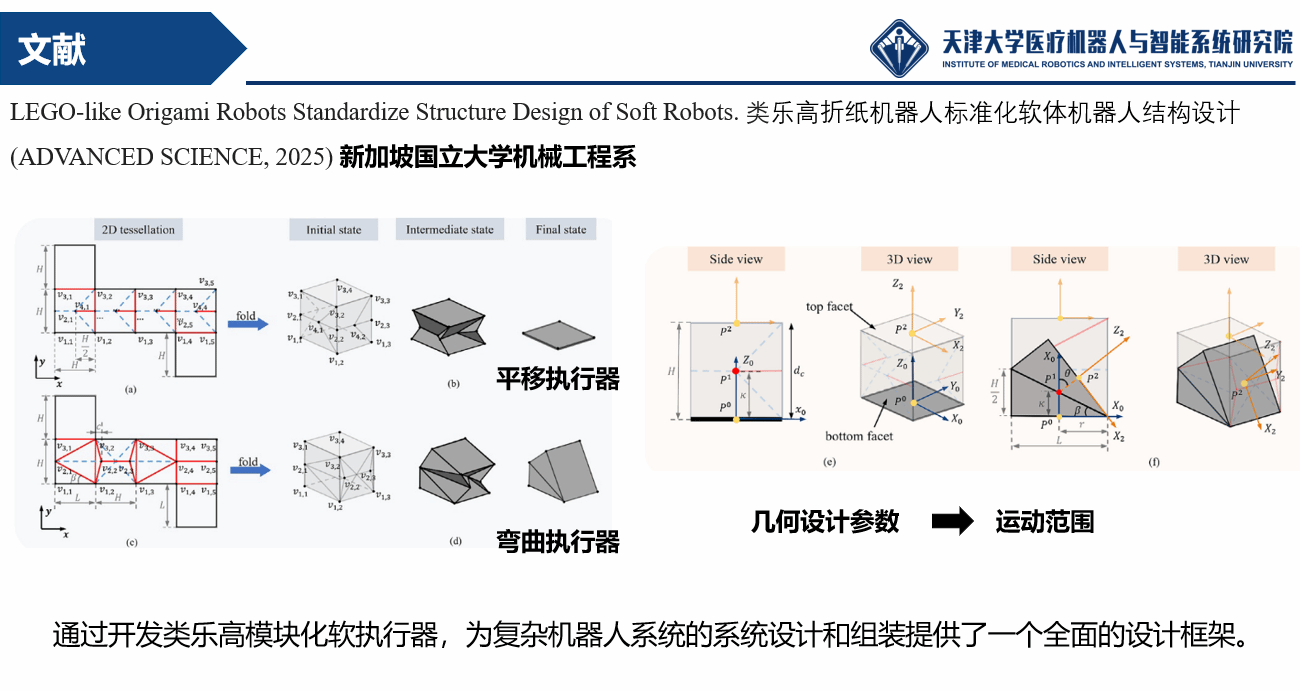
研究院2023级博士研究生赵海心分享了论文《LEGO‐like Origami Robots Standardize Structure Design of Soft Robots》。文章围绕模块化折纸驱动器的标准化设计与装配,提出了一套面向软体机器人的自动化构建方法论,实现了从单元设计到系统集成的全流程规范化。
传统折纸机器人研究通常基于零厚度假设,导致理论模型与实物存在较大偏差。本文通过建立考虑材料实际厚度的运动学方程,显著提升了模型精度。在此基础上,作者提出了基于优化的装配策略,将模块化折纸驱动器的组合过程标准化,使复杂机器人系统的构建变得系统且可复现。文章验证了两种LEGO式折纸驱动器单元,并依据装配策略将其组合为多种功能性机器人系统。此外,团队还成功设计、制造并测试了两款面向不同任务场景的软体机器人,进一步验证了该设计框架在功能性机器人系统中的广泛适用性。总体而言,本文提供了一套完整的设计框架,通过将厚度补偿运动学建模与优化驱动的装配策略相结合,实现了模块化折纸驱动器到精确、功能性机器人系统的标准化装配流程。
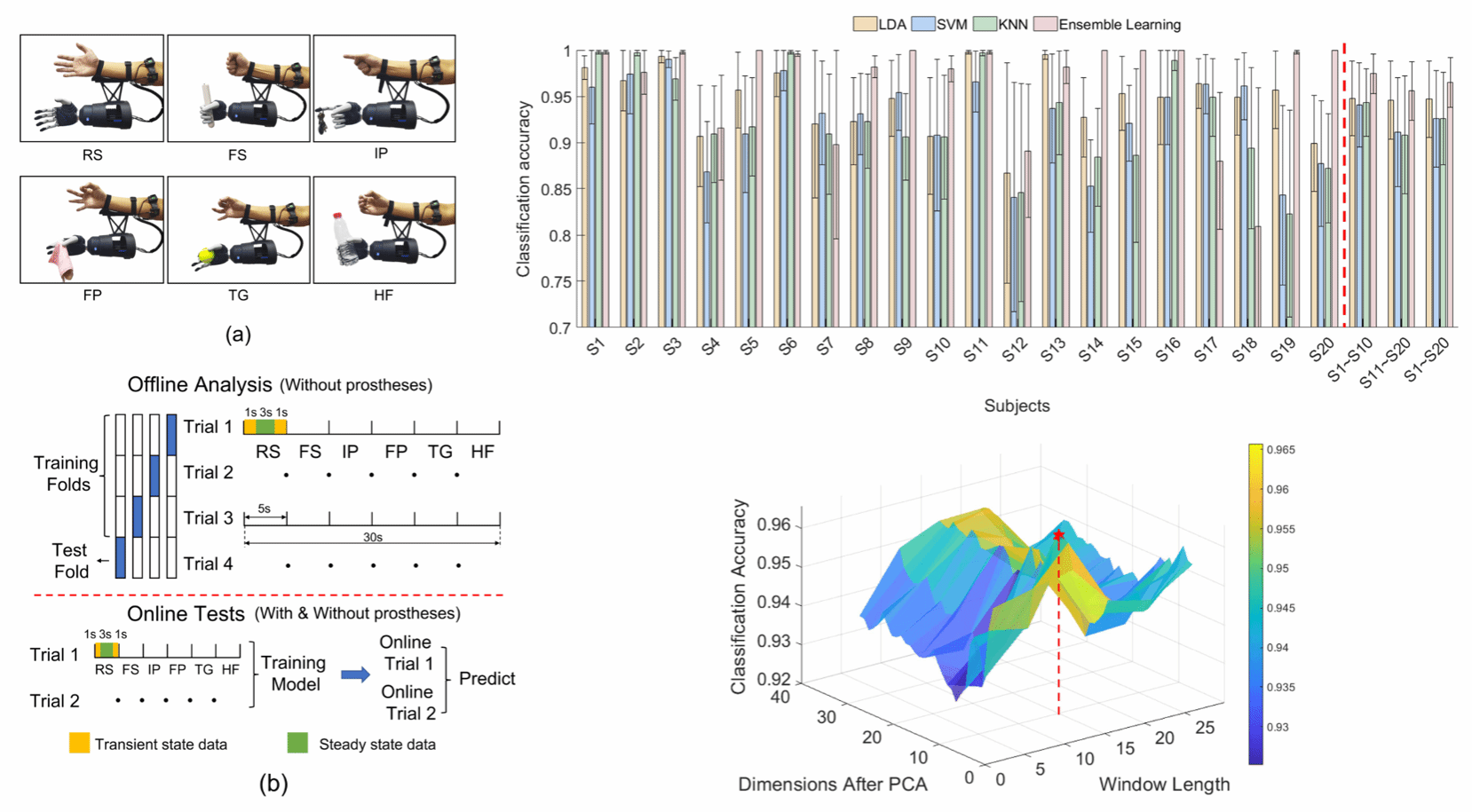
研究院2024级硕士研究生陈逸飞围绕《针对乳腺的超声换能器激励系统设计与研究》进行报告分享。表面肌电信号(sEMG)在假肢的控制上广泛应用,但存在解码鲁棒性不足、无法获取空间深度信息等问题,且多通道模式识别等技术尚未广泛商用。超声可以非侵入性地检测肌肉变形,在假手控制方面有很大的应用潜力,同时存在传统超声波设备过于笨重,无法应用于可穿戴式场景的局限。基于此,研究提出了一种可以集成到假手中的紧凑型超声波设备。
该小型化超声系统包括四个用于感知肌肉变形的超声换能器、一个信号激励/采集模块和一个假手控制模块。其波形发射部分,微控制器向LM96570发出命令,低电压信号被传递到STHV748芯片,进行波形激励和回声接收。外部电源模块提供50V的高压源,STHV748在激励模式下可以产生±50V的高频方波信号,激励1-3个压电材料产生超声波。在实验评估阶段,离线分析使用了4种分类学习算法,其中集成学习分类准确率最高,LDA次之且所用时间更短。在线测试中,未佩戴假肢时平均分类准确率96.5±3.0%,佩戴假肢时为91.5±6.4%,满足临床使用要求(>90%)。
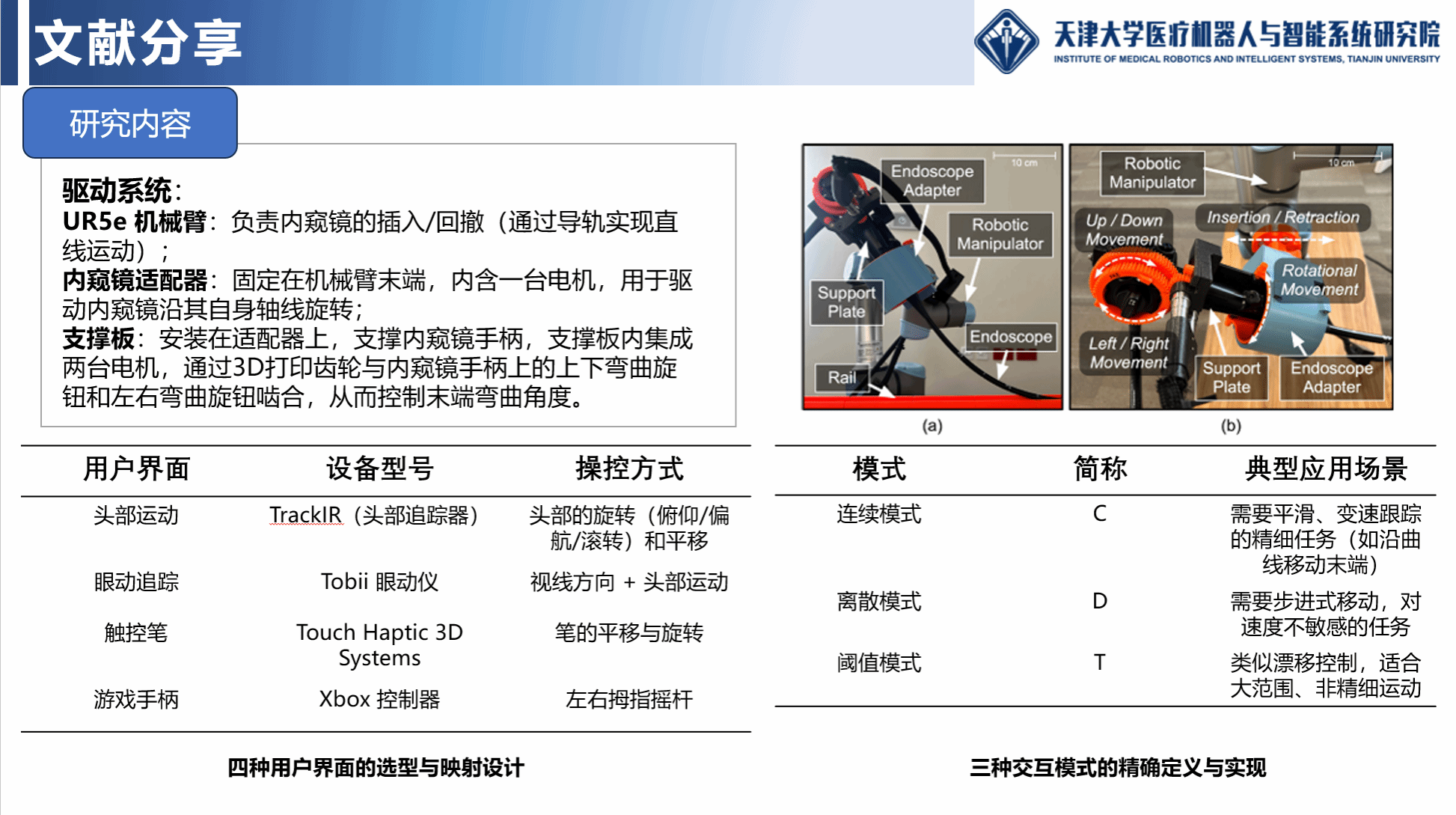
研究院2024级硕士研究生张家诚进行了题为《消化内镜辅助机器人系统设计与研发》的报告分享。首先分享了一篇发表于IEEE的论文,该文系统比较了四种用户界面(手柄、头戴式、眼动、触控笔)在驱动式柔性内窥镜操控中的性能,发现游戏手柄在所有交互模式下综合最优,而头戴式和眼动虽精度稍逊但能解放双手,为课题组后续人机交互设计提供了重要参考。
在研究进展方面,针对消化道癌症的严峻现状及内窥镜手术中医生缺少“第三只手”的临床痛点,分析了现有内窥镜辅助机器人在体积、自由度、功能集成及安全性方面的不足。基于此,优化设计了第二代位姿调节机构,包括z轴、pitch、yaw及直线导轨四自由度,采用五根正反牙丝杆构成的三角形结构提升刚度,完成了运动学建模、可达空间计算和电机选型,并开展了刚度理论模型推导,验证了紧凑构型的可行性。后续将开展系统集成与运动控制实验,为消化内镜辅助机器人的安全、精准、小型化奠定基础。
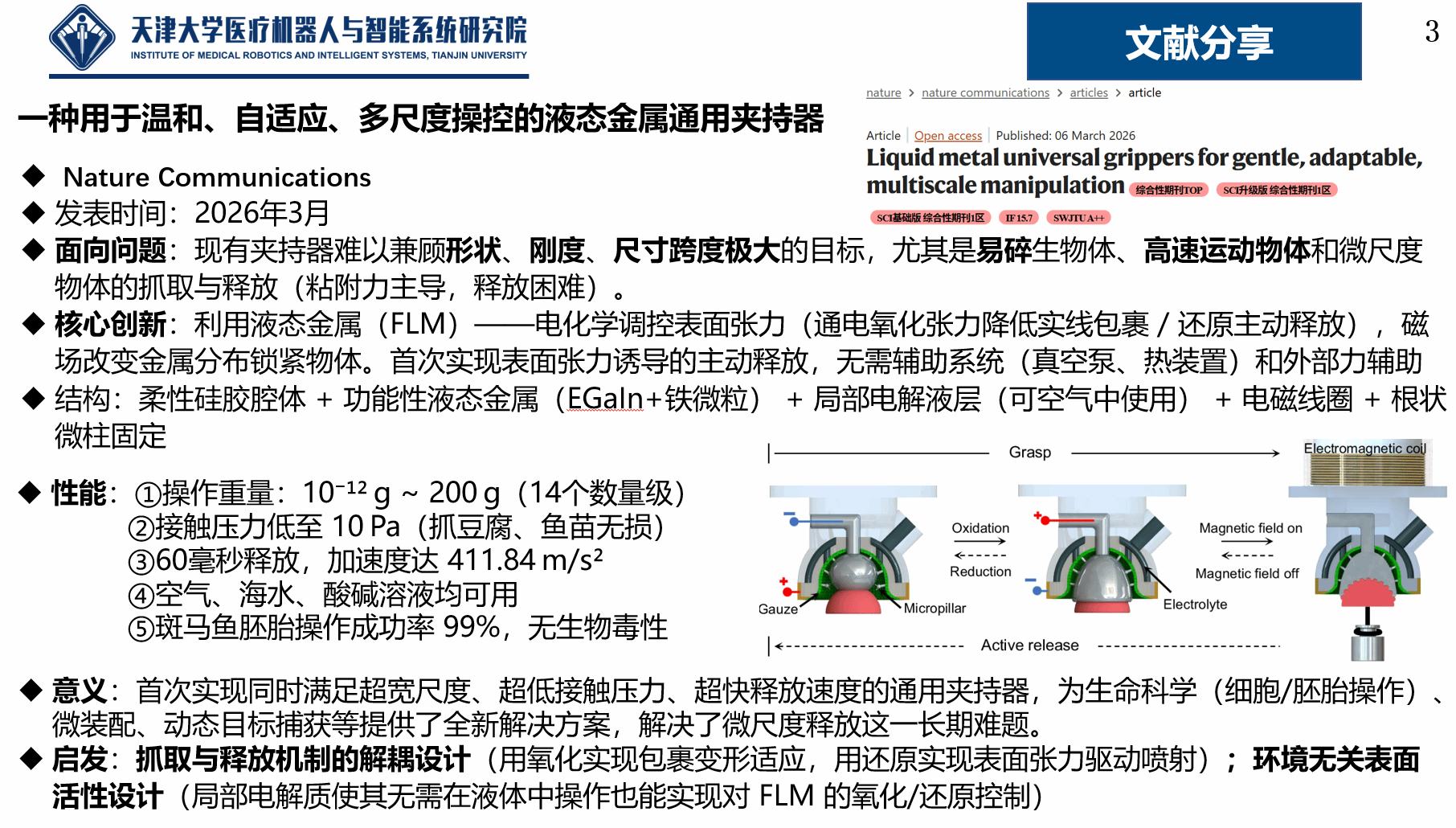
研究院2024级硕士研究生乔志伟围绕《面向单细胞无损操作的微夹持器设计与力估计》进行报告分享。为了解决现有机器人夹持技术在面对形状、尺寸、刚度差异极大的目标物体时表现出的适应性差、损伤风险高、释放困难等核心问题,研发了一种基于液态金属的通用型夹持器(LiMU gripper)。
该夹持器的核心是一滴由镓铟合金与铁微粒混合而成的功能性液态金属(FLM),通过电化学与磁场的协同调控实现抓取与释放的快速切换。施加正电压使液态金属表面氧化,表面张力降至接近零,从而自适应地包裹任意形状的目标,并在磁场作用下牢牢锁住目标。释放时施加负电压还原表面,高表面张力恢复,将微物体以“弹射”方式主动弹出,克服了微观操作中物体难以脱附的难题。该夹持器的操作对象重量跨度可达14个数量级,主动释放微物体的时间仅数毫秒,还可捕捉快速移动的蟑螂,并以99%的成功率完成斑马鱼胚胎的转移操作,且无生物毒性。总体而言,这项研究为生物医学操作、微装配及动态目标捕获提供了一种兼具宽适应性、低损伤性与高可控性的新型微操作工具。
文献来源:
[1]Jiang, Puhua and Sun, Mingze and Huang, Ruqi. Neural Intrinsic Embedding for Non-rigid Point Cloud Matching [C]. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR 2023). 2023
[2]Wang Z, Wang Y, Zhang H. LEGO‐like Origami Robots Standardize Structure Design of Soft Robots[J]. Advanced Science, 2026, 13(5): e13881.
[3]Yin Z, Chen H, Yang X, et al. A wearable ultrasound interface for prosthetic hand control[J]. IEEE journal of biomedical and health informatics, 2022, 26(11): 5384-5393.
[4]Basha S, Khorasani M,Abdurahiman N, et al. Evaluation of user interfaces for actuated control of endoscopes during flexible endoscopy[J]. IEEE Journal of Translational Engineering in Health and Medicine, 2026.
[5]Chen X, Zhang M, Cao L, et al. Liquid metal universal grippers for gentle, adaptable, multiscale manipulation[J]. Nature Communications, 2026.

