
新闻动态
news dynamic
news dynamic
发布日期:2026-05-14
5月11日,天津大学医疗机器人与智能系统研究院开展2026年第九期研究生阅读报告分享会,5名研究生依次进行了阅读报告分享。
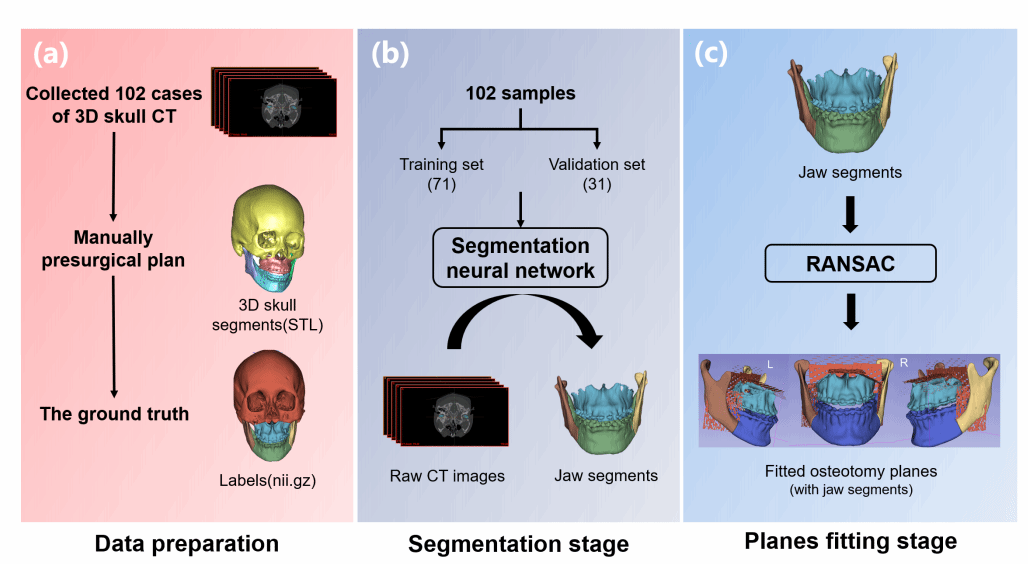
研究院2022级博士研究生吕奕欧分享了论文《Ortho-OPD: an Automatic Osteotomy Planes Design Model for Orthognathic Surgery Based on Deep Learning》。针对正颌外科虚拟手术规划过程中截骨平面设计高度依赖医生经验、操作耗时较长的问题,研究提出了一种基于深度学习的自动化截骨平面设计框架。整体流程主要包括两个阶段:首先利用三维卷积神经网络对颅颌面CT进行骨块分割,然后通过RANSAC算法自动拟合截骨平面,实现从原始CT数据到截骨方案的自动生成。
研究重点提出了边界敏感的分割策略,通过增强骨块边界特征,提高截骨区域边缘分割精度,从而保证后续平面拟合的准确性。实验结果表明,该方法在私有数据集上的Dice达到0.92,平均仅需约9秒即可完成完整的虚拟截骨规划,相比人工设计大幅提高了效率。同时,研究还对截骨平面的角度误差以及与重要解剖结构之间的安全距离进行了分析,结果显示自动生成的截骨平面与医生设计结果具有较高一致性,并能够有效避开牙根及重要神经血管结构。该研究提出的深度学习在自动化术前规划中的应用方式,以及“分割+几何拟合”结合的整体思路,对后续开展HTO自动截骨规划与关键点约束建模具有一定参考意义。
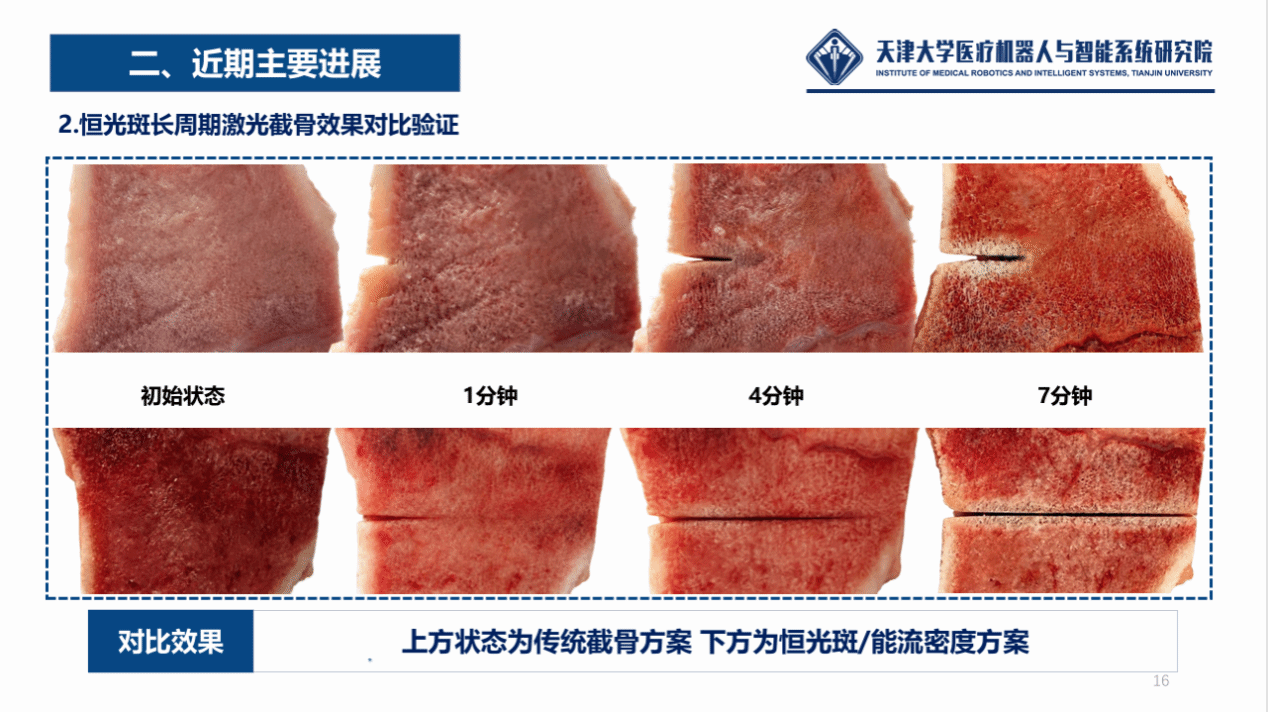
研究院2023级博士研究生刘彦甫分享了《激光截骨系统近期进展》。多尺度评估铒激光截骨文献探讨了铒激光与传统机械摆锯在截骨手术中的差异,离体动物骨骼实验表明,激光截骨能够精确执行复杂几何轨迹,并具有切缝更窄、切面更平整以及更高几何保真度的优势。多尺度分析证实,激光截骨显著降低了热损伤与机械损伤,且空骨陷窝率更低。此外,激光形成的骨界面更利于早期细胞的黏附、存活、铺展与浸润。尽管激光具有低损伤和高精度的优势,但当前最突出的问题仍是截骨效率不足,且现有研究尚缺乏长期骨愈合的临床验证。
为克服效率瓶颈并满足大体积深骨消融需求,团队开展了智能高效深骨消融系统的研发与验证工作。通过长周期截骨效果验证表明,恒光斑闭环消融方案的最终消融深度远超传统静态方案,且骨缝深宽比和均一性指标显著提升。团队还进行了光纤耦合与系统小型化、消融深度推导与后续规划工,目前的简化透镜方案所能达到的消融深度距离真实临床手术的大深度需求仍有一定差距,入纤前的光学系统及光束质量仍需进一步优化。
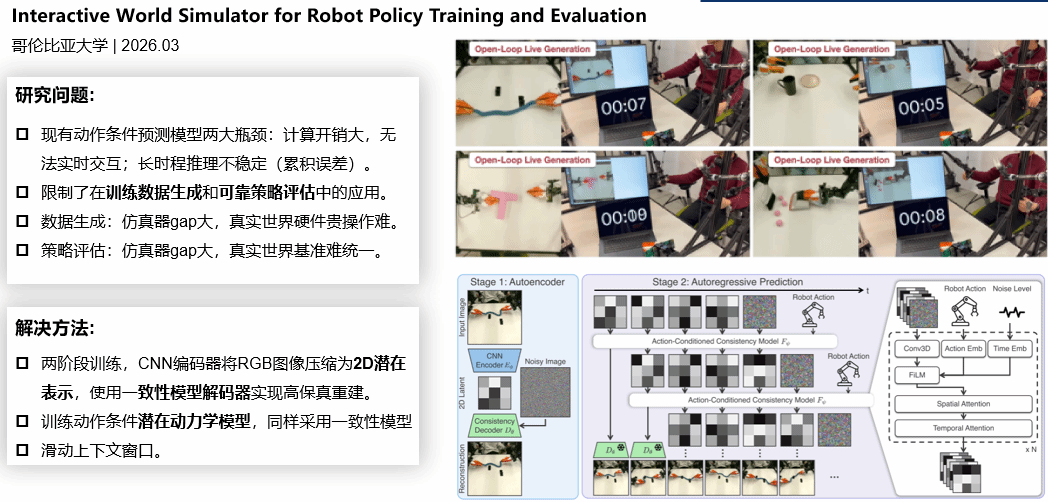
研究院2024级硕士研究生王国维围绕《用于手术机器人自主操作的“模仿-强化”自适应框架》展开分享。世界模型方向的前沿工作表明,交互式世界模拟器通过一致性模型实现高保真、长时程稳定的机器人交互预测,可服务于低成本数据生成和策略评估;Cosmos-H-Surgical面向外科机器人数据稀缺问题,利用手术视频世界模型生成合成视频-动作数据,可提升VLA 策略训练效果。
聚焦手术机器人自主操作中存在的模仿学习对高质量专家数据依赖强、泛化能力不足,强化学习在稀疏奖励条件下样本效率低、早期探索不稳定,以及手术数据存在多模态操作风格和扰动样本不足等问题,研究提出了三阶段“模仿-强化”框架。该框架先运用隐式多样化策略建模专家多模态动作分布,再在当前策略分布下预热Critic获得稳定价值估计,最后开展在线模仿-强化协同训练,并引入策略扰动生成器增强域外恢复能力。在SurRoL稀疏奖励任务中对比多类机器人学习算法实验结果显示,该方法综合成功率达到0.93,在复杂任务中优势更明显。消融实验进一步验证了多阶段训练、混合采样和策略扰动模块对收敛速度、稳定性及抗干扰能力的重要作用。
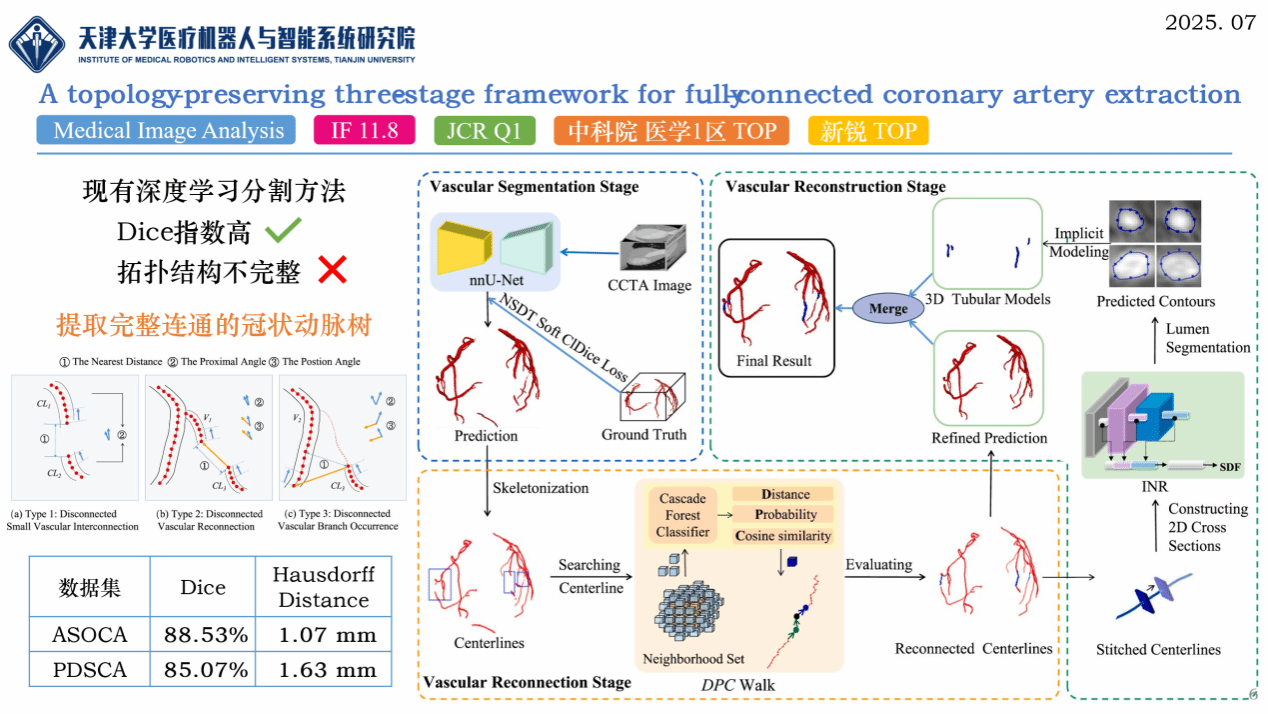
研究院2024级硕士研究生曹蕊进行了题为《胃癌手术域多结构三维建模与坐标化研究》的报告分享。针对冠状动脉血管分割中细小远端、低对比及狭窄区域易断裂的问题,研究团队提出三阶段拓扑保持框架,实现完整联通的血管树提取。第一阶段采用nnU-Net进行初始分割,并引入中心线增强损失,提高对小血管及中心线区域的识别能力;第二阶段通过改进DPC walk方法,结合距离、中心线概率和方向一致性对断裂血管进行重连;第三阶段利用隐式神经表示(INR)重建缺失血管腔,使修复区域平滑连续。
评价指标除了Dice指数,还使用豪斯多夫距离量化预测分割边界与真实标注的最大空间偏差。实验结果显示,该方法在两个公开数据集上表现优异,最大偏差仅为1.63mm。文献还对血管断裂形式进行了分类,并针对不同类型提出差异化重连策略,为血管重建和分割方法设计提供参考。该方法通过深度学习分割、中心线重连和隐式几何重建的结合,实现了端到端方法难以达到的完整血管树提取,同时提升分割精度与拓扑连通性,为血管拓扑修复与血管标签评价提供了新思路。
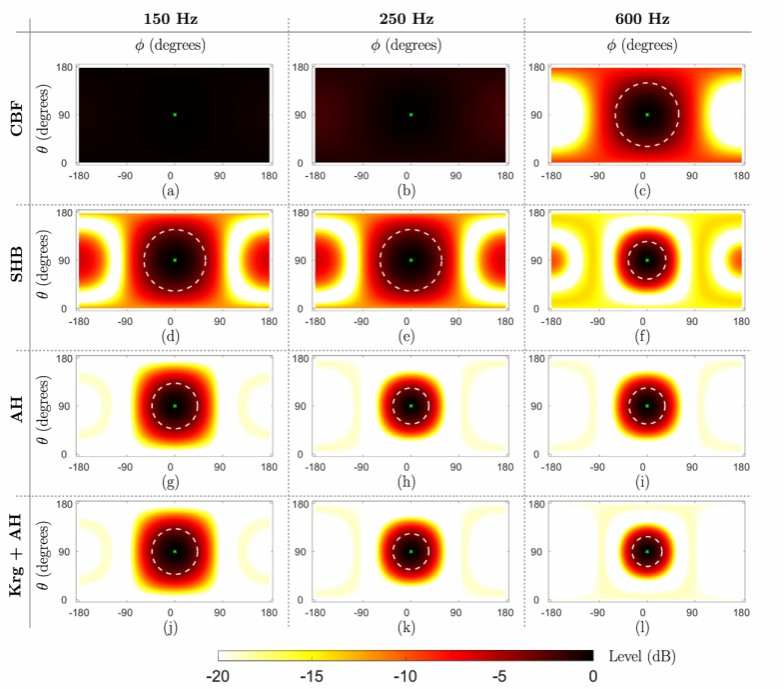
研究院2024级硕士研究生刘诗颖围绕《基于声学信息的截骨摆锯健康状态监测方法研究》进行报告分享。在声学成像时,低频信号由于波长较长,往往会导致传统波束形成(如DAS或传统MUSIC)的主瓣极宽,空间分辨率严重下降,需要极大的阵列才能有效解析。常规波束形成(CBF)在100Hz达到及格解析度,需半径>90cm的巨型阵列,在车厢、机舱、手术室或狭小工业现场不可行。球谐波束形成 (SHB)需要设定截断阶数N,为了缩小主瓣需要更高的N,但这要求麦克风数量呈平方级增加,且该算法对噪声极其敏感。
有文献提出了一种基于“声场虚拟化”(Virtualization)的先进成像方法,通过空间重构与纯数学插值(结合声学物理模型的统计学方法),在实际的物理麦克风之间“计算生成”高精度的虚拟麦克风信号。此方法无需增加任何实际的硬件传感器,即可在算法层面极大扩展阵列的有效孔径。该研究为包含极少麦克风的小尺寸阵列在极低频率下实现高精度的声源定位提供了思路,也为开发低成本、手持式、搭载嵌入式系统的声学相机提供了完整的理论基础和落地方案。
文献来源:
[1]Wang Yiming, Li Xiangmin, Yang Yang, et al. Ortho-OPD: an Automatic Osteotomy Planes Design Model for Orthognathic Surgery Based on Deep Learning[J]. IEEE Journal of Biomedical and Health Informatics, 2025. DOI:10.1109/JBHI.2025.3638775.
[2]Shen A, Huang B, Bao H, et al. A Multiscale Evaluation of Erbium-Doped Yttrium-Aluminum-Garnet Laser Osteotomy: Integrating Macroscopic and Cellular Analyses[J]. Bioengineering, 2026, 13(2): 237.
[3]Wang Y, Syed R, Wu F, et al. Interactive World Simulator for Robot Policy Training and Evaluation[J]. arXiv preprint arXiv:2603.08546, 2026.
[4]QIU Y, SHAN D, WANG Y, et al. A topology-preserving three-stage framework for fully-connected coronary artery extraction [J]. Medical Image Analysis, 2025, 103: 103578.
[5]Forma L, Rouard K, Doutres O, et al. Virtualization-based acoustic imaging for low-frequency source localization[J]. Journal of Sound and Vibration, 2026, 623: 119515. DOI: 10.1016/j.jsv.2025.119515.

