
新闻动态
news dynamic
news dynamic
发布日期:2026-05-20
5月18日,天津大学医疗机器人与智能系统研究院开展2026年第十期研究生阅读报告分享会,5名研究生依次进行了阅读报告分享。
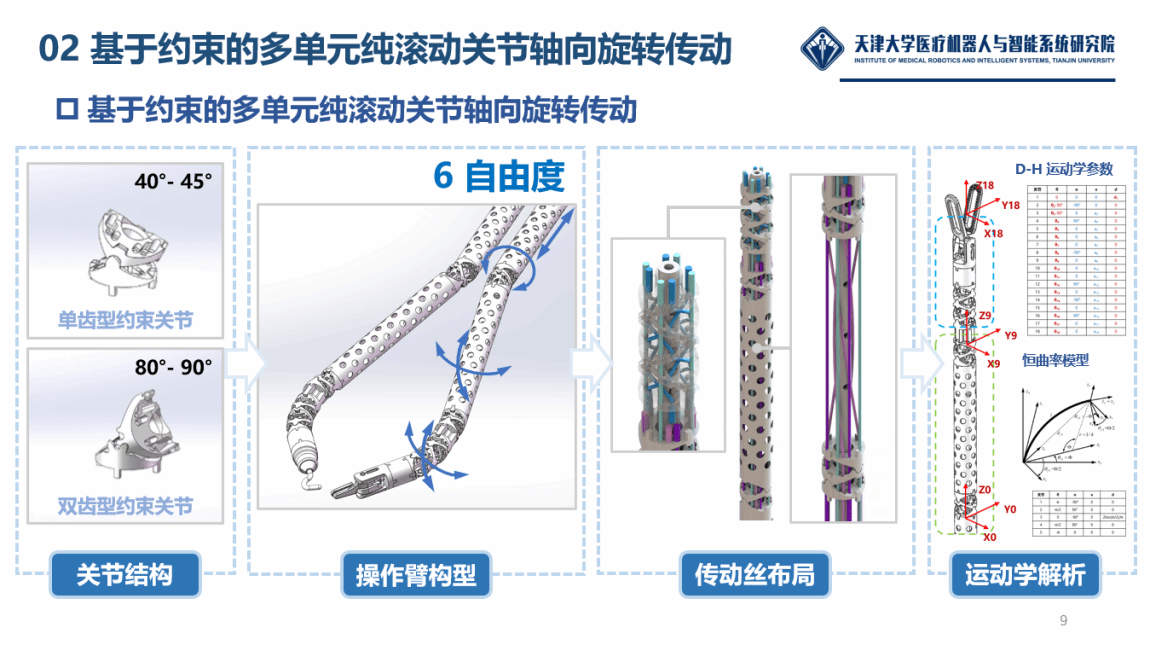
研究院2022级博士研究生蔡程程围绕《单孔手术机器人器械设计方法》展开分享。面向紧凑型关节手术器械远端轴向旋转的机构层级设计,研究提出了一种基于多单元丝驱动纯滚动关节的六自由度机器人手术器械末端轴向旋转传动方法,通过滚动接触界面与闭环丝驱动拓扑形成分布式几何约束,实现了区别于弹性扭转变形的确定性旋转传动。
研究通过建立面向多单元纯滚动关节的约束拓扑与运动学建模方法,揭示了滚动约束、丝路布置、关节排列与末端轴向旋转传动之间的内在关系,为弯曲构型下的轴向旋转传动分析提供了理论基础;设计了可串联扩展的纯滚动关节单元及其弯曲模块、平移模块和六自由度组合构型,实现弯曲、平移与末端轴向旋转功能在紧凑手术器械中的集成;分析了弯曲运动与末端轴向旋转之间的耦合传动特性,并通过约束设计使其具备明确的几何映射关系,降低了对额外驱动、复杂补偿控制或柔性扭转传动的依赖。同时,研制出六自由度机器人手术器械样机,并通过实验验证了该方法在不同弯曲构型下实现稳定、连续、构型不敏感的末端轴向旋转传动能力,证明了所提出机构方案的可行性和应用潜力。
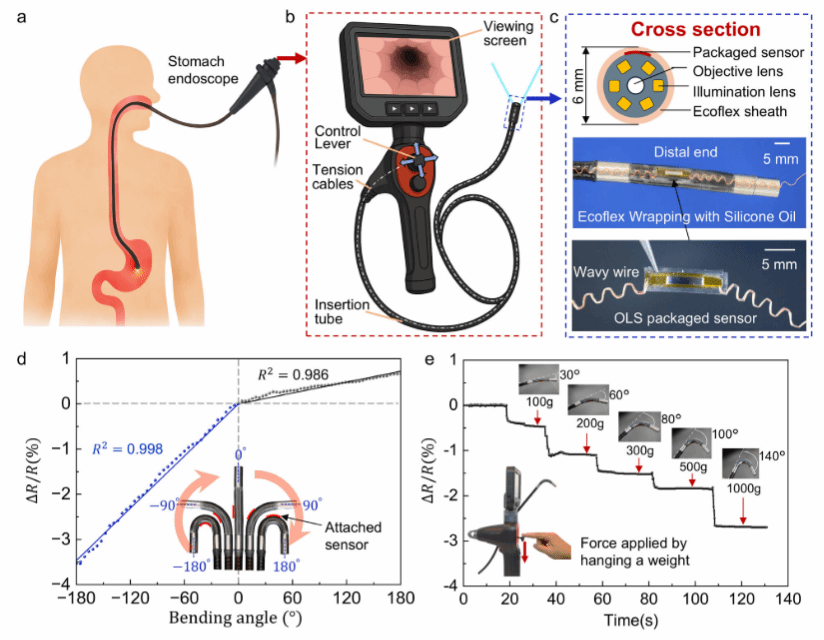
研究院2023级博士研究生王召耀分享了论文《A Strain Decoupling Packaging Strategy for High-Fidelity Ultrathin Silicon Shape Sensors for Soft Medical Robotics》。为解决传统封装方案在保护超薄硅传感器时面临的应力直接传递、中性轴对齐困难以及动态测量性能差三大核心挑战,文章提出了一种油润滑可滑动(OLS)封装策略。
传统层压式或嵌入式封装中,封装层与传感器紧密粘合,当外部发生拉伸或弯曲时,应变会连续传递到脆弱的硅层上,导致其极易在低于1%的应变下断裂。OLS封装采用双层柔性薄膜(HMS)形成密封腔体,内部充满低粘度硅油,传感元件(硅+PI基底)完全浸没在油中,可自由滑动,不与封装层发生刚性粘接,避免了粘弹性材料的迟滞效应。传感器响应时间<0.40秒,迟滞仅约3%,远优于嵌入式结构。在2mm极小弯曲半径下,经过10,000次循环后信号无衰减,证明了滑动保护机制的有效性。该方案被成功应用于外径约6mm的柔性内窥镜,实验表明:同时存在器械弯曲和插入管体整体变形的情况下,OLS传感器依然能准确监测末端弯曲角度,并能清晰分辨不同胃部病变部位对应的不同弯曲角度。
研究院2024级硕士研究生张峰菩围绕《基于人机决策仲裁的内窥镜共享控制方法研究》展开分享。眼动追踪在提升、评价视野的意图契合度和视野调节控制上至关重要,为了实现头显中眼动追踪数据到内窥镜运动尺度的映射,研究采用九点标定和2D仿射模型拟合的映射关系,平均拟合误差为2.3%。基于文献中视野调节不确定性的安全性思路启发,在博弈仲裁机制中融入对机器人预测模型置信度的判定,置信度过低代表机器人当前的可靠度较低,仲裁器会直接执行“人占权、机器人让权”的博弈策略。
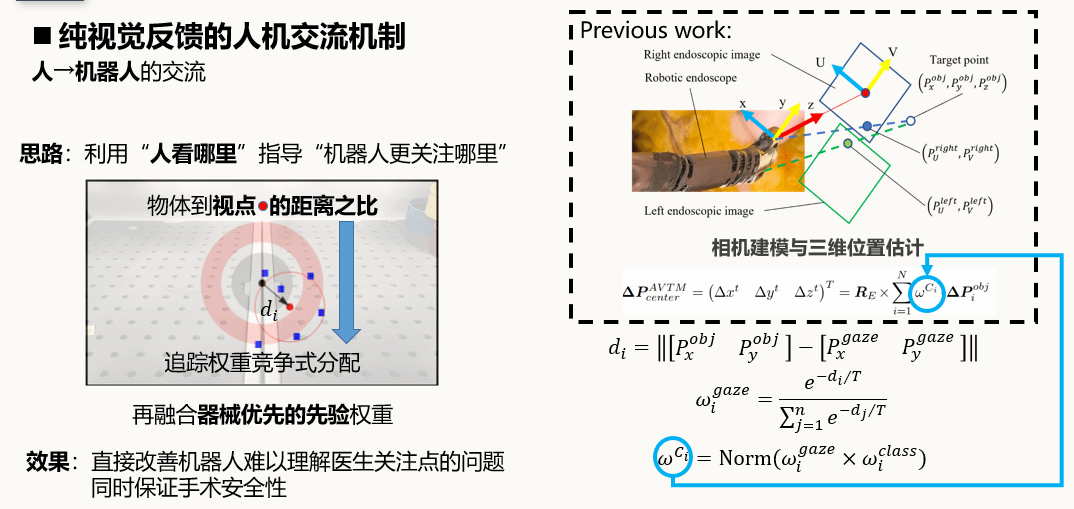
在机器人智能方面,研究为分割模型扩展了1600多张的高质量动物肾切除手术数据集标注,训练效果较好,预测基本能满足视觉伺服要求,但对小目标的分割精度仍有不足。研究还设计了纯视觉反馈的人到机器人的交流机制,设计效果为利用“人看哪里”指导“机器人更关注哪里”。具体为以预测物体位置到工作1标定后的视点位置的欧氏距离为比,实现追踪权重的竞争式分配,再融合“器械优先”的先验权重矩阵,在直接改善机器人难以理解医生关注点的问题的同时保证手术安全性。
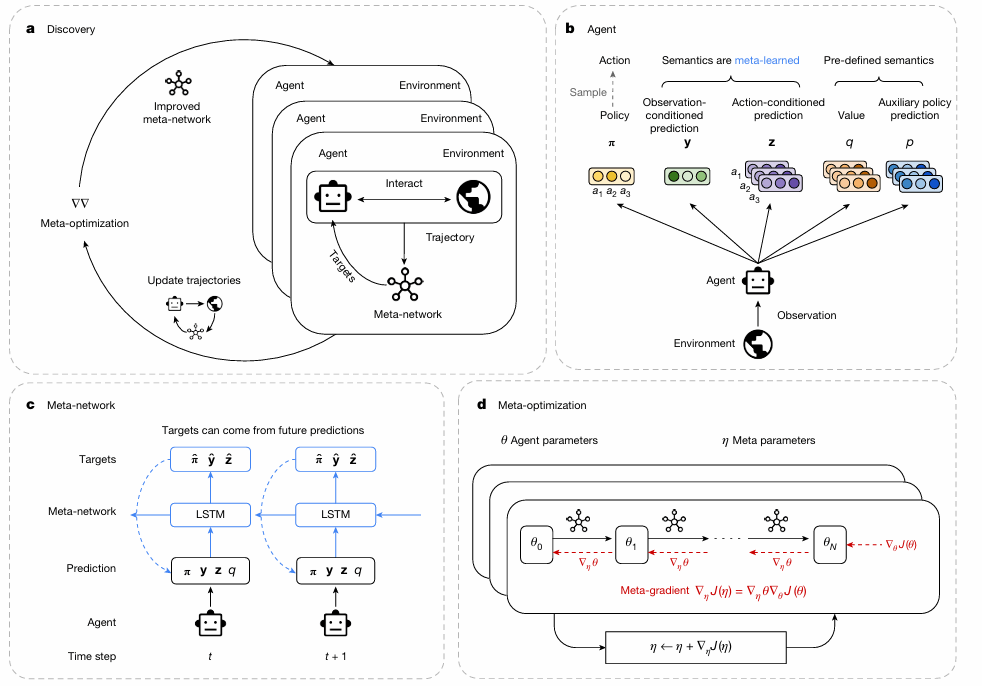
研究院2024级硕士研究生刘博分享了论文《Discovering state-of-the-art reinforcement learning algorithms》。过去几十年所有成功的RL算法(DQN、PPO、MuZero、Dreamer 等)均由人类研究者手工设计,过程缓慢、劳动密集,且严重依赖人类的知识和直觉。人类只能探索算法空间中极小的一部分,难以发现可能更高效、更通用的学习规则,手工设计的算法往往针对特定任务优化,难以适应广泛多样的复杂环境。此前大量尝试自动发现RL算法的工作仅搜索现有算法的超参数或损失函数的微小变体,在简单的网格世界等环境中进行元训练,发现的算法性能远低于最先进的手工设计算法,且泛化能力极差。
文章提出了一种大规模元学习框架,能够从大量智能体在复杂多样环境中的交互经验中自动发现完整的RL规则。该框架发现的算法DiscoRL在Atari等多个权威基准测试上全面超越了包括MuZero、Dreamer在内的所有现有手工设计算法,且展现出极强的跨环境泛化能力。本文的方法体系包含智能体优化(快速学习)和元优化(慢速学习如何学习)两个相互嵌套的优化循环。其中,智能体按照元网络给出的目标更新自己的策略和预测,元网络通过元梯度优化自己的参数,目标是让所有智能体获得最大奖励。
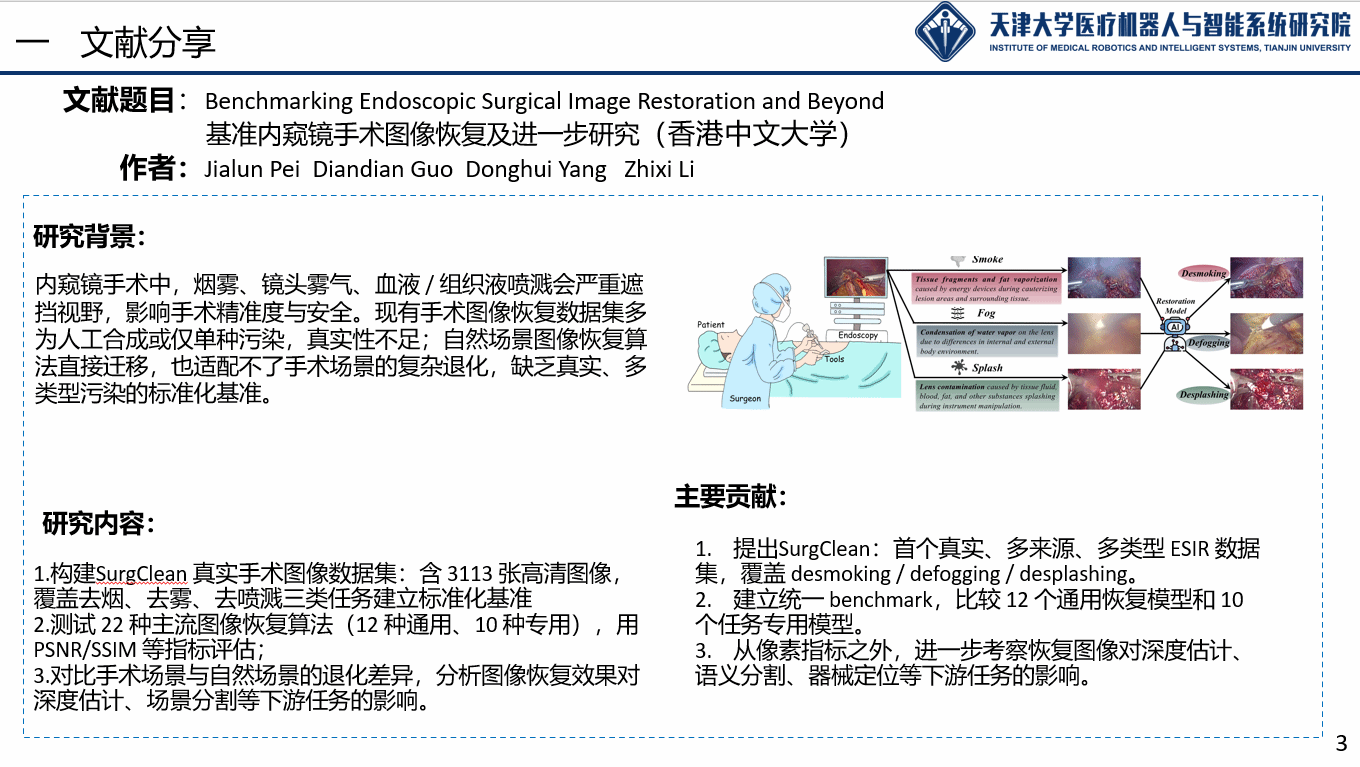
研究院2024级硕士研究生史亚伟围绕《微创手术持镜助手设计及其控制系统研究》进行报告分享。微创手术中内镜视野常受到电外科烟雾、镜头起雾以及血液、组织液、脂肪等飞溅污染影响,导致解剖结构和病灶区域难以辨认,进而影响手术判断与安全。针对现有数据集多为合成数据或仅关注单一去烟任务的问题,文章构建了真实场景下的多类型数据集SurgClean,覆盖去烟、去雾和去飞溅三类任务,并按退化程度或污染物类型细分。
由于真实视频中污染帧与清晰参考帧难以完全对齐,论文采用前序清晰帧作为参考标签,并通过光流估计和图像变形完成配准。作者评估了22种代表性图像修复方法,并采用PSNR、SSIM、LPIPS、NIQE和PI等指标进行比较。实验结果表明,现有自然图像修复方法迁移到手术场景后效果仍有限,尤其在严重烟雾、雾化和局部飞溅遮挡下,关键解剖细节难以恢复。论文还从深度估计和场景分割角度分析了手术退化与自然退化的差异,说明单纯提升像素级清晰度不一定能改善下游临床理解。整体来看,该研究提供了系统数据集和评价基准,也提示未来算法应结合手术语义、真实退化机理和轻量化部署需求进行设计。
文献来源:
[1]H.Liu, M.Takakuwa, M.Yamamoto, et al. A Strain Decoupling Packaging Strategy for High-Fidelity Ultrathin Silicon Shape Sensors for Soft Medical Robotics. Advanced Science13, no. 22 (2026): e18733.
[2] WANG J Y, WEI Y R, JIANG L, et al. VisionSafeEnhanced VPC: Cautious Predictive Control With Visibility Constraints Under Uncertainty for Autonomous Robotic Surgery [J]. IEEE Robotics and Automation Letters, 2026, 11(3): 3590-3597
[3]Oh, J., Farquhar, G., Kemaev, I. et al. Discovering state-of-the-art reinforcement learning algorithms. Nature 648, 312–319 (2025).
[4]Pei J, Guo D, Yang D, et al. Benchmarking Endoscopic Surgical Image Restoration and Beyond[J]. arXiv preprint arXiv:2505.19161, 2025.

