
科学研究
scientific research
scientific research
发布日期:2024-01-11
随着近些年微创外科的快速发展,越来越多的传统手术被其替代。在外科医生训练的过程中,医生需要掌握高级的精神运动技能和视觉空间技能。因此,为了能反映出受训人员在操作过程中技能的薄弱点以及技能提升程度,确保临床手术中的安全性,客观科学的评价体系在外科医生的培训中必不可少。
1.安全性评价主要通过哪些方式进行呢?
有研究表明,外科医生的技能主要体现在对器械的运动控制和力控制能力两个方面。近年来,随着传感技术以及运动捕捉技术的不断发展,现有研究利用多种数据采集装置,收集医生操作过程中的器械运动和施加力的数据,从而更加全面、客观地评价医生的操作水平。
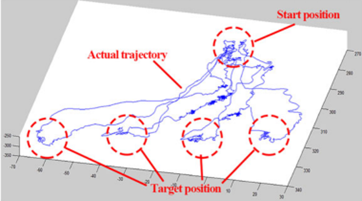
器械运动轨迹可视化图
器械—组织交互力可视化图
2.运动控制技能具体该怎么评价呢?
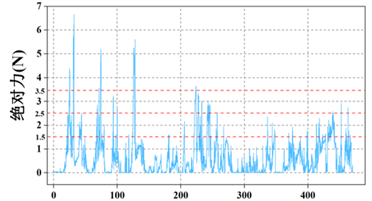
对操作过程中的运动控制技能评价,主要是利用轨迹捕捉设备收集手术器械末端的轨迹信息对操作者进行客观地评价。如下图1(a)和(b)所示,基于手术机器人末端执行器的轨迹数据,引入了转角和弯曲度新特征,来描述外科医生操作的灵活性。如下图1(c)和(d)所示天津大学团队利用自主研发的“妙手S”系统,进行单-双手的协调测试,通过对机器人末端执行器运动的运动学分析,提出了速度-精度-稳定性平衡的量化评估模型,应用基于机器人末端执行器运动的八个指标来评估操作人员的技能。
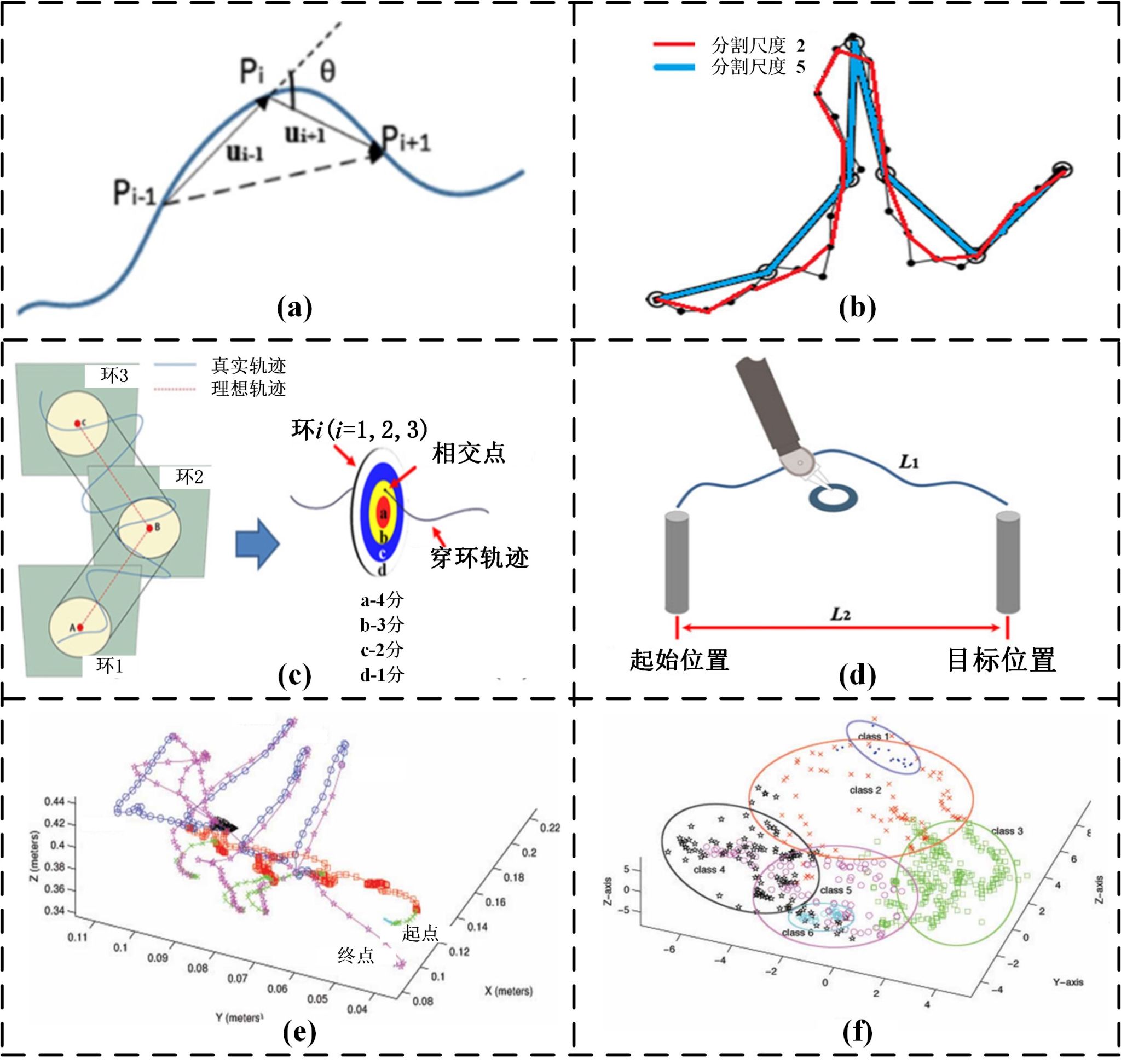
图1 基于器械运动状态的安全性评价
3.力控制技能具体该怎么评价呢?
对于缝合过程中组织处理技能的评价,主要通过力传感设备收集器械与组织之间的交互力信息,并借助多个评价指标对操作技能进行客观地评价。如下图2(a)与(b)所示,其中包括三个线性应变计和一个扭矩计,并将其安装在仪器的顶端,可用于测量操作过程中手术器械末端的受力。如下图2(c)所示,研究开发出一种与现有箱式训练器结合的力传感器,可用于对手术操作中力信息的测量评估。如下图2(d)所示,利用牛顿第二定律的原理,使用加速度传感器开发出一套用于在缝合过程中测量动态力的装置,收集不同经验受试者的力信息进行技能评价,从而确保是操作过程的安全性。
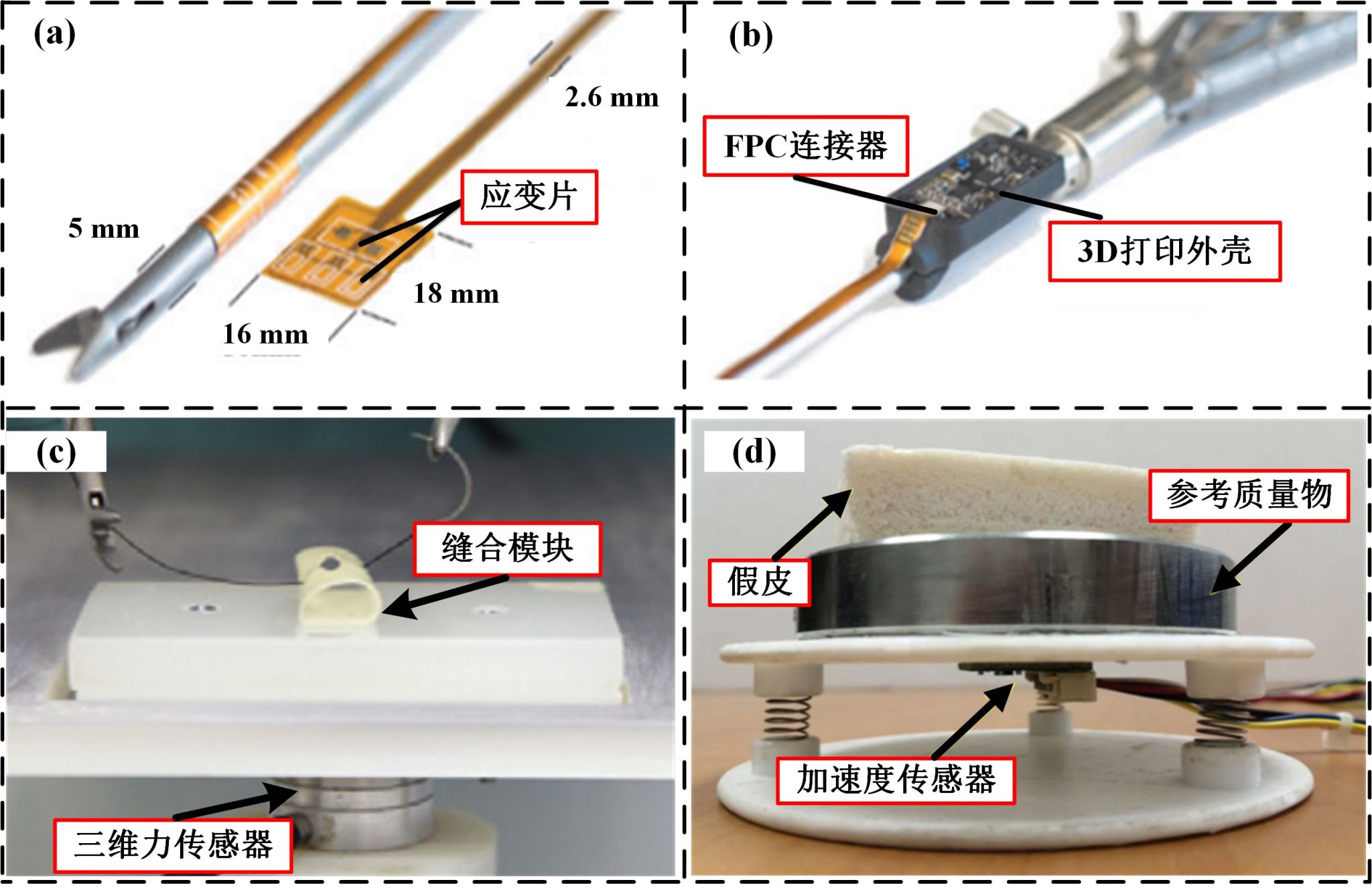
图2 基于器械—组织交互力的安全性评价

